实验四 用Hough变换提取曲线的参数 实验目的 (1)了解边缘检测算子的原理,并利用边缘算子对图像进行检测;
(2)掌握Hough变换的基本原理。
实验内容 (1)分别将原始图像及加高斯噪声、椒盐噪声后的图像中圆形边缘检测出来;
(2)用Hough变换对边缘进行参数提取。
实验要求 (1)实验用图像文件:原始图像(houghorg.bmp)、加高斯噪声后图像(houghgau.bmp)和加椒盐噪声后图像(houghsalt.bmp);
图6.3 原始图像
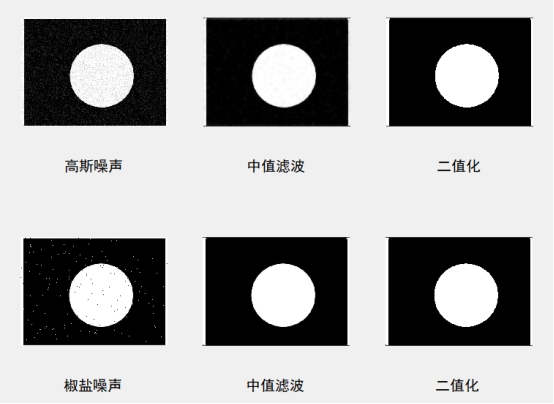
(2)在含有噪声的背景下,先对图像中值滤波,再进行边缘检测;
(3)将目标的边界提取出来。边缘检测算子可利用matlab自带函数实现,使用Robert、Sobel和Laplacian算子;
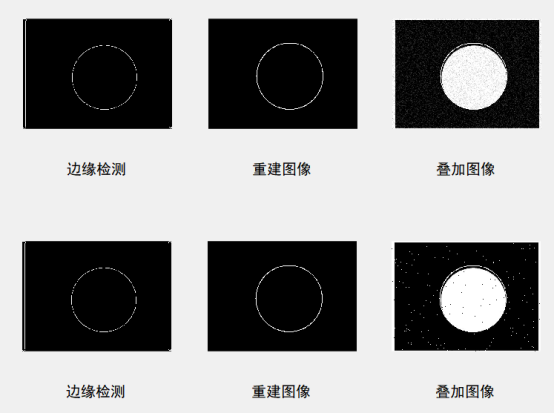
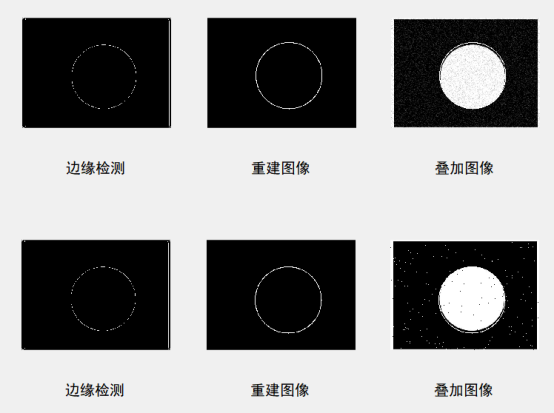
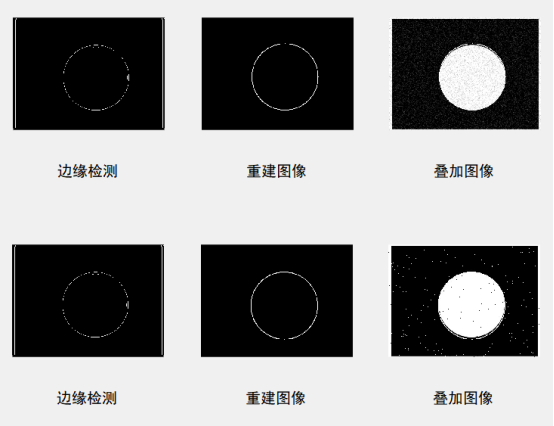
(4)利用Hough变换提取的参数绘制曲线,并叠加在噪声图像上。
4.实验要点:
(1)利用算子进行边缘检测:可先将加噪以后的图像进行平滑滤波,如采用9*9的掩膜模板进行中值滤波;为了对图像中图形边缘进行线性提取,可通过设置阈值将图像变为二值图像,再利用三种不同的算子(Robert、Sobel和Laplacian)来完成边缘的检测;
(2)Hough变换进行曲线参数提取:在使用三种算子对加噪后图像进行边缘检测以后,使用Hough变换对检测后图像进行参数提取,并在提取成功以后,使用提取获得的参数进行图像的重建,最后将重建图像叠加到加噪图像中。注意在进行Hough变换时,对比观察获得图像与使用算子进行边缘检测获得图像之间的区别
实验原理 Hough变换:Hough变换是1962年由Hough提出来的,用于检测图像中直线、圆、抛物线、椭圆等形状能够用一定函数关系描述的曲线,它在影像分析,模式识别等很多领域中得到了成功的应用。
Hough变换的基本原理是将影像空间中的曲线(包括直线)变换到参数空间中,通过检测参数空间中的极值点,确定出该曲线的描述参数,从而提取影像中的规则曲线。
实验结果与分析 实验结果:
(一)加高斯噪声后图像:
加椒盐噪声后图像:
(二)在含有噪声的背景下,先对图像中值滤波,再进行边缘检测
(三)将目标的边界提取出来。边缘检测算子可利用matlab自带函数实现,使用Robert、Sobel和Laplacian算子;
(四)利用Hough变换提取的参数绘制曲线,并叠加在噪声图像上。
Robert:
Sobel:
Laplacian:
表 1 Hough变换边界提取结果
高斯噪声
椒盐噪声
圆心
半径
圆心
半径
Robert
242 176
97
241 170
98
Sobel
243 179
99
242 178
98
Laplacian
242 177
97
242 177
97
实验分析:
观察实验结果,三种算子都能有效提取边界,但使用不同的算子提取出来的边缘质量有差别。Laplacian算子在Hough变换后重建的边缘与原图像有一定偏离,这可能是由于Laplacian算子对噪声点有一定的放大作用。
由于Hough变换提取的是曲线边界,也就将之前算子检测到的图像边缘的边界滤除了,最终效果很好。程序运行用时较长,是Hough变换算法的遍历过程所致。
主要代码 主程序: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 clc clear all houghorg = imread('houghorg.bmp' ); houghorg = rgb2gray(houghorg); houghgau = imnoise(houghorg,'gaussian' ,0 ,0.01 ); houghsalt = imnoise(houghorg,'salt & pepper' ,0.01 ); imwrite(houghgau,'houghgau.bmp' ) imwrite(houghsalt,'houghsalt.bmp' ) z = 9 ; houghgau_z = medfilt2(houghgau,[z z]); houghsalt_z = medfilt2(houghsalt,[z z]); imwrite(houghgau_z,'houghgau_z.bmp' ) imwrite(houghsalt_z,'houghsalt_z.bmp' ) t = third1(houghgau_z); houghgau_er = houghgau_z; houghgau_er(houghgau_er<=t) = 0 ; houghgau_er(houghgau_er>=t) = 255 ; imwrite(houghgau_er,'houghgau_er.bmp' ) t = third1(houghsalt_z); houghsalt_er = houghsalt_z; houghsalt_er(houghsalt_er<=t) = 0 ; houghsalt_er(houghsalt_er>=t) = 255 ; imwrite(houghsalt_er,'houghsalt_er.bmp' ) houghgau_er = double(houghgau_er); G = edge(houghgau_er,'Roberts' ); houghgau_er_Robert = G; imwrite(G,'houghgau_er_Robert.bmp' ) houghsalt_er = double(houghsalt_er); G = edge(houghsalt_er,'Roberts' ); houghsalt_er_Robert = G; imwrite(G,'houghsalt_er_Robert.bmp' ) G = edge(houghgau_er,'sobel' ); houghgau_er_Sobel = G; imwrite(G,'houghgau_er_Sobel.bmp' ) G = edge(houghsalt_er, 'sobel' ); houghsalt_er_Sobel = G; imwrite( G,'houghsalt_er_Sobel.bmp' ) G = edge(houghgau_er,'log' ); houghgau_er_Laplacian = G; imwrite(houghgau_er_Laplacian,'houghgau_er_Laplacian.bmp' ) G = edge(houghsalt_er,'log' ); houghsalt_er_Laplacian = G; imwrite(houghsalt_er_Laplacian,'houghsalt_er_Laplacian.bmp' ) [circle_xy,circle_r] = Hough(houghgau_er_Robert) imwrite(ht(circle_xy,circle_r), 're_houghgau_er_Robert.bmp' ) re_houghgau_er_Robert = imread('re_houghgau_er_Robert.bmp' ); he_houghgau_er_Robert = houghgau; he_houghgau_er_Robert(re_houghgau_er_Robert==255 )=255 ; imwrite(he_houghgau_er_Robert,'he_houghgau_er_Robert.bmp' ); [circle_xy,circle_r] = Hough(houghsalt_er_Robert) imwrite(ht(circle_xy,circle_r), 're_houghsalt_er_Robert.bmp' ) re_houghsalt_er_Robert = imread('re_houghsalt_er_Robert.bmp' ); he_houghsalt_er_Robert = houghsalt; he_houghsalt_er_Robert(re_houghsalt_er_Robert==255 )=255 ; imwrite(he_houghsalt_er_Robert,'he_houghsalt_er_Robert.bmp' ); [circle_xy,circle_r] = Hough(houghgau_er_Sobel) imwrite(ht(circle_xy,circle_r), 're_houghgau_er_Sobel.bmp' ) re_houghgau_er_Sobel = imread('re_houghgau_er_Sobel.bmp' ); he_houghgau_er_Sobel = houghgau; he_houghgau_er_Sobel(re_houghgau_er_Sobel==255 )=255 ; imwrite(he_houghgau_er_Sobel,'he_houghgau_er_Sobel.bmp' ); [circle_xy,circle_r] = Hough(houghsalt_er_Sobel) imwrite(ht(circle_xy,circle_r), 're_houghsalt_er_Sobel.bmp' ) re_houghsalt_er_Sobel = imread('re_houghsalt_er_Sobel.bmp' ); he_houghsalt_er_Sobel = houghsalt; he_houghsalt_er_Sobel(re_houghsalt_er_Sobel==255 )=255 ; imwrite(he_houghsalt_er_Sobel,'he_houghsalt_er_Sobel.bmp' ); [circle_xy,circle_r] = Hough(houghgau_er_Laplacian) imwrite(ht(circle_xy,circle_r), 're_houghgau_er_Laplacian.bmp' ) re_houghgau_er_Laplacian = imread('re_houghgau_er_Laplacian.bmp' ); he_houghgau_er_Laplacian = houghgau; he_houghgau_er_Laplacian(re_houghgau_er_Laplacian==255 )=255 ; imwrite(he_houghgau_er_Laplacian,'he_houghgau_er_Laplacian.bmp' ); [circle_xy,circle_r] = Hough(houghsalt_er_Laplacian) imwrite(ht(circle_xy,circle_r), 're_houghsalt_er_Laplacian.bmp' ) re_houghsalt_er_Laplacian = imread('re_houghsalt_er_Laplacian.bmp' ); he_houghsalt_er_Laplacian = houghsalt; he_houghsalt_er_Laplacian(re_houghsalt_er_Laplacian==255 )=255 ; imwrite(he_houghsalt_er_Laplacian,'he_houghsalt_er_Laplacian.bmp' );
Hough: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 function [ par1, par3 ] = Hough ( BW ) r_max=100 ; r_min=40 ; step_r=1 ; step_angle=pi /20 ; p=0.5 ; [m,n] = size (BW); size_r = round ((r_max-r_min)/step_r)+1 ; size_angle = round (2 *pi /step_angle); hough_space = zeros (m,n,size_r); [rows,cols] = find (BW); ecount = size (rows); for i =1 :ecount for r=1 :size_r for k=1 :size_angle a = round (rows(i )-(r_min+(r-1 )*step_r)*cos (k*step_angle)); b = round (cols(i )-(r_min+(r-1 )*step_r)*sin (k*step_angle)); if (a>0 & a<=m & b>0 & b<=n) hough_space(a,b,r) = hough_space(a,b,r)+1 ; end end end end max_para = max (max (max (hough_space))); index = find (hough_space>=max_para*p); length = size (index);hough_circle = false (m,n); for i =1 :ecount for k=1 :length par3 = floor (index(k)/(m*n))+1 ; par2 = floor ((index(k)-(par3-1 )*(m*n))/m)+1 ; par1 = index(k)-(par3-1 )*(m*n)-(par2-1 )*m; if ((rows(i )-par1)^2 +(cols(i )-par2)^2 <(r_min+(par3-1 )*step_r)^2 +5 &... (rows(i )-par1)^2 +(cols(i )-par2)^2 >(r_min+(par3-1 )*step_r)^2 -5 ) hough_circle(rows(i ),cols(i )) = true ; end end end for k=1 :length par3 = floor (index(k)/(m*n))+1 ; par2 = floor ((index(k)-(par3-1 )*(m*n))/m)+1 ; par1 = index(k)-(par3-1 )*(m*n)-(par2-1 )*m; par3 = r_min+(par3-1 )*step_r; par(:,k) = [par1,par2,par3]; end par1=[par2 par1]; end
ht: 1 2 3 4 5 6 7 8 9 10 11 12 13 function hb = ht ( par1, par3 ) par1_y = par1(1 ); par1_x = par1(2 ); hb = zeros (325 , 440 ); k = 1 ; for i = 1 :325 for j = 1 :440 if ((abs (i -par1_x)^2 + abs (j -par1_y)^2 ) >= (par3-k)^2 ) && ((abs (i -par1_x)^2 + abs (j -par1_y)^2 ) <= (par3+k)^2 ) hb(i , j ) = 255 ; end end end hb = uint8(hb);

 wechat
wechat alipay
alipay