数字信号处理总结(持续更新)
离散时间信号与系统
常用典型信号及其表示
连续复指数信号(连续正余弦信号):
e^jΩt^ = cos(Ωt) + jsin(Ωt)
四个参数:振幅A、相位φ、衰减σ、频率Ω
离散时间正弦序列:
x[n] = A cos( ω0n + Φ )
周期 N:N = 2πm / ω0 为整数
离散时间正弦信号不一定具有周期性
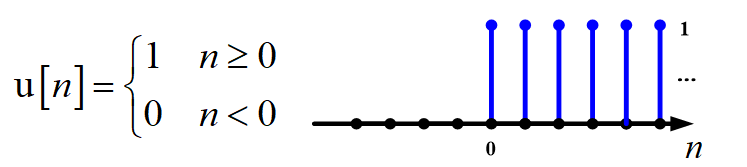
单位阶跃序列
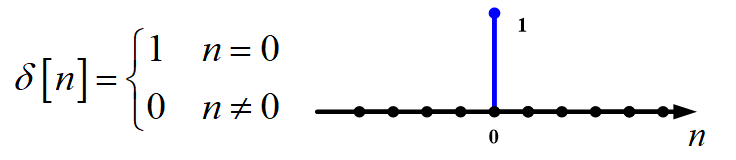
单位脉冲序列
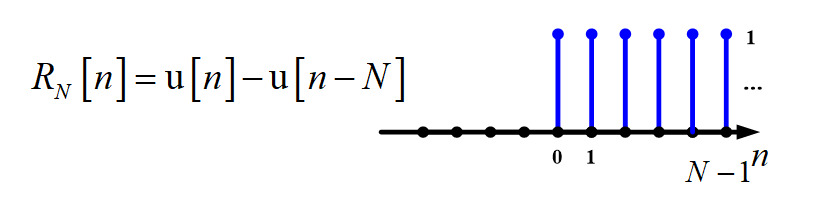
矩形序列
系统属性
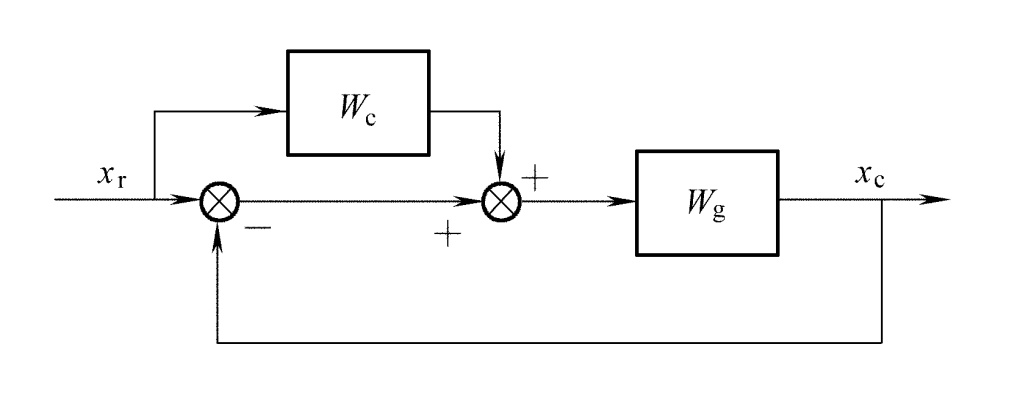
并联、级联、反馈
一般情况下,级联 顺序影响结果
线性时不变系统 跟 级联顺序 无关
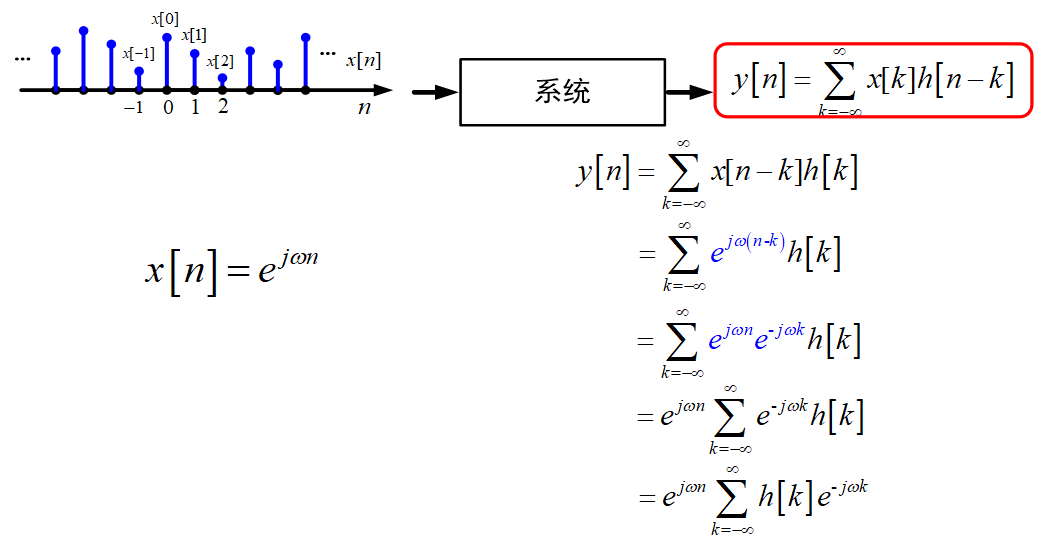
LTI系统的卷积和表示
任意序列均可分解成加权延时脉冲线性组合
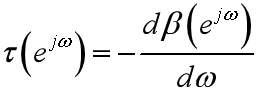
LTI系统单位脉冲响应及输入、输出间的关系:
交换律、结合律、分配律
N阶后向差分方程:
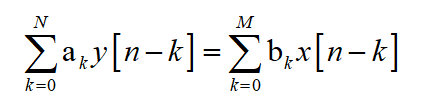
后向差分方程多用于 因果系统 与 数字滤波器 的分析
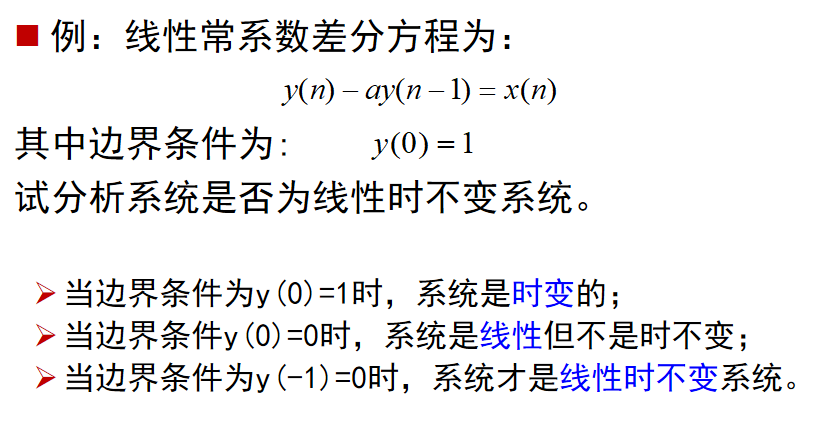
线性指的是 线性组合 ,并不是因为它对应于一个线性系统,边界条件决定了对应关系
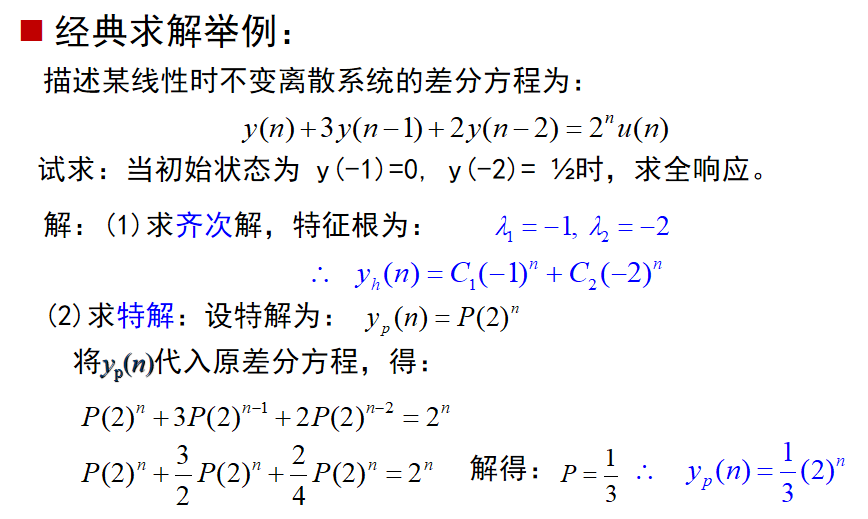
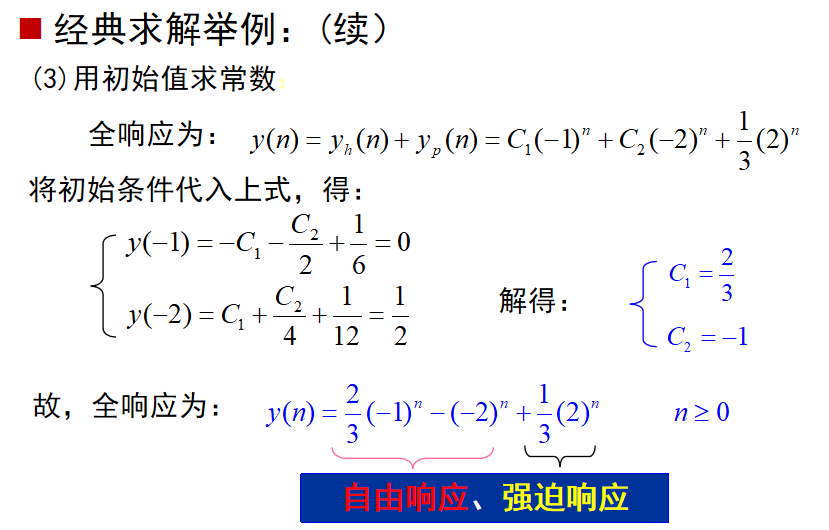
差分方程求解:迭代法(不易求闭合解)、经典法(齐次解和特解)、卷积、Z变换法
差分方程与系统属性的关系:
1、同一个差分方程,不同边界条件,求解结果也不同
2、常系数差分方程不能唯一确定一个系统,给定边界条件才唯一
3、常系数差分方程是构成LTI系统的必要条件
4、零状态的线性常系数差分方程,才相当于线性时不变系统
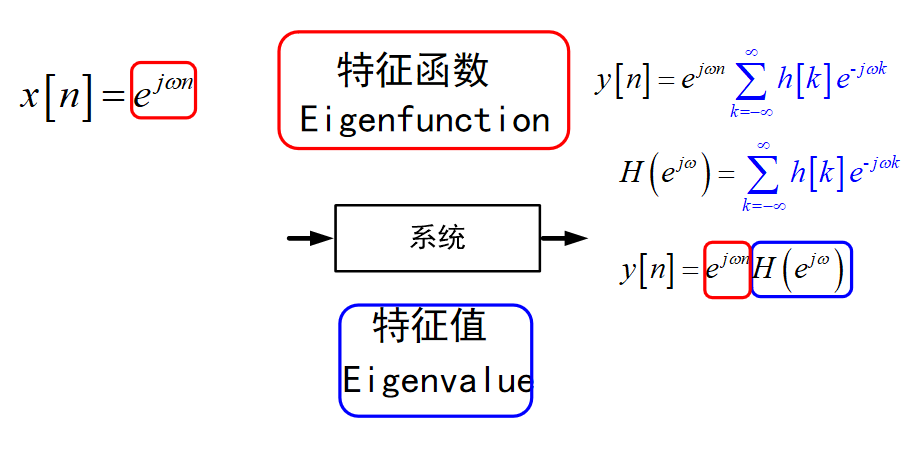
特征函数及离散时间傅里叶变换
复指数信号是LTI系统的特征函数
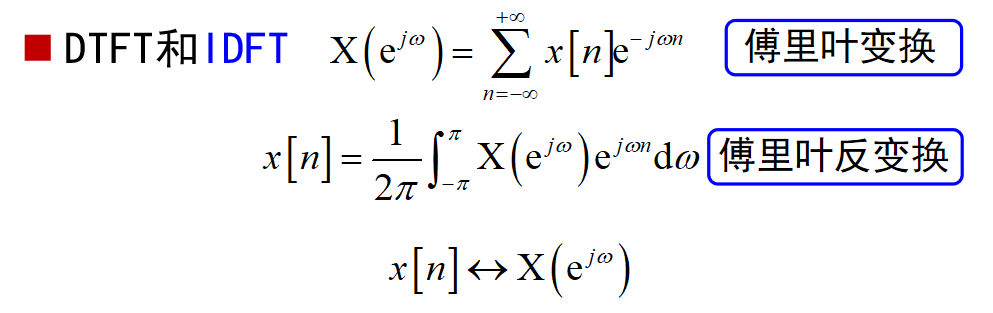
离散时间傅里叶变换(DTFT)
信号DTFT表示的三个条件
收敛条件1:x[n] 绝对可和
收敛条件2:x[n] 平方可和
收敛条件3: 特殊函数 δ(ω)
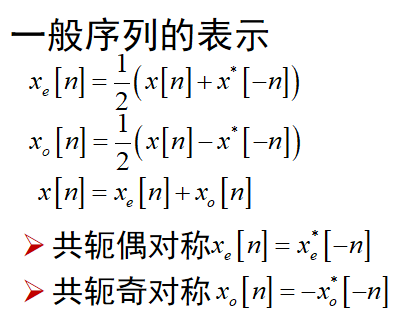
离散时间傅里叶变换的性质
DTFT的对称性质
1、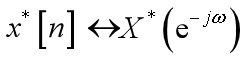
2、
3、
4、
5、
6、
线性、时移、频移、时间反褶
线性:

时移:

频移:
反褶:
频域微分:
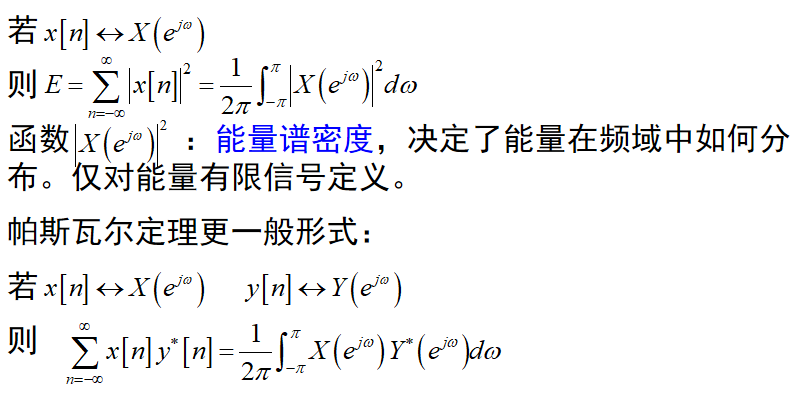
Parsaval定理、时域卷积、调制
帕斯瓦尔定理:
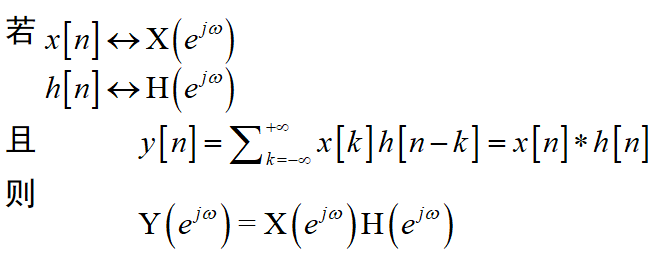
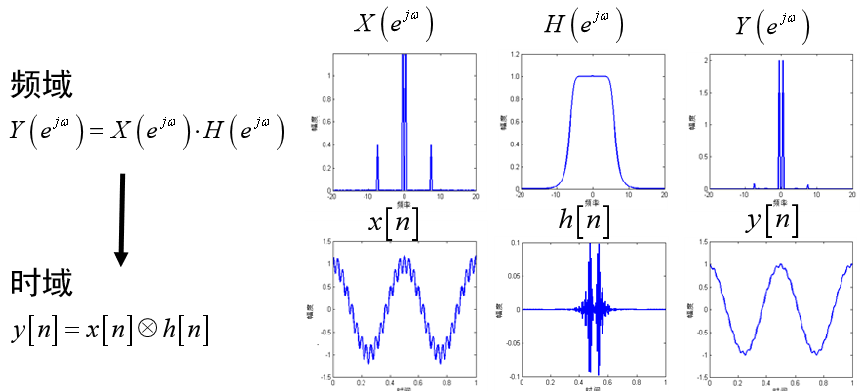
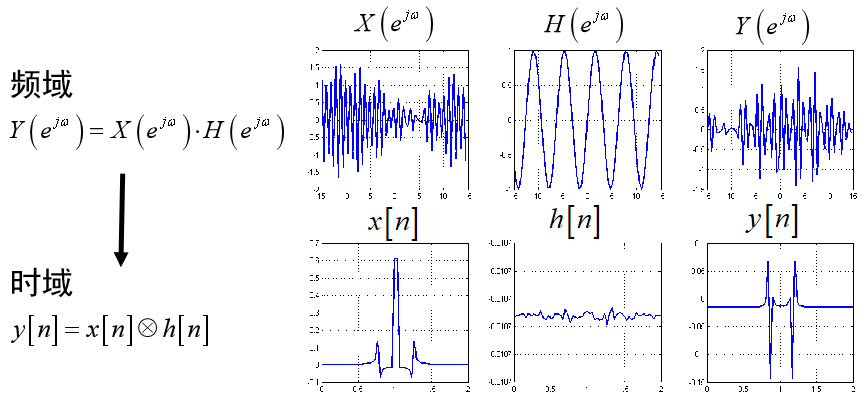
卷积定理:
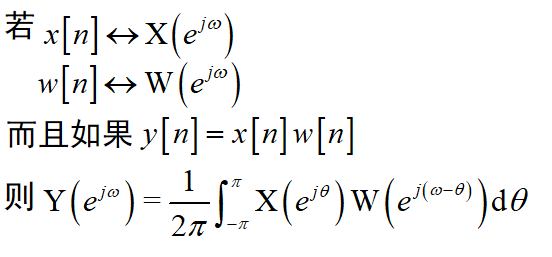
调制:
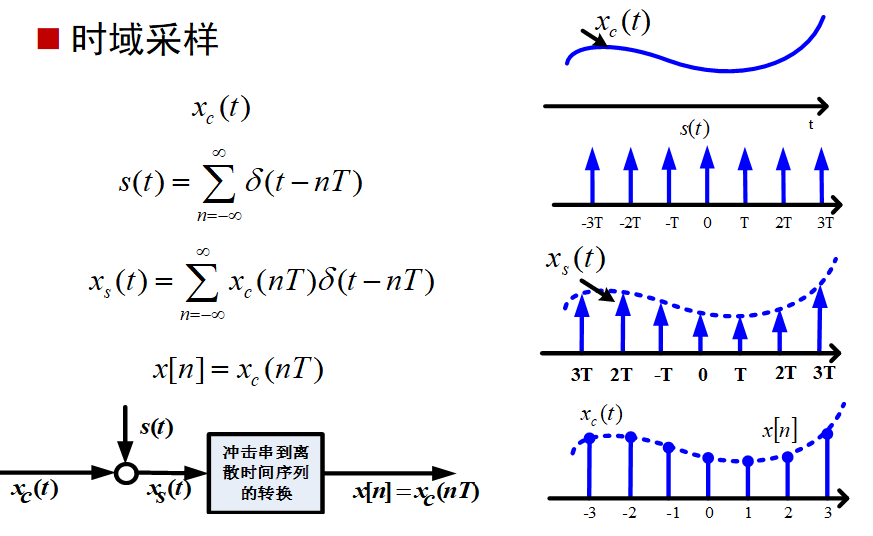
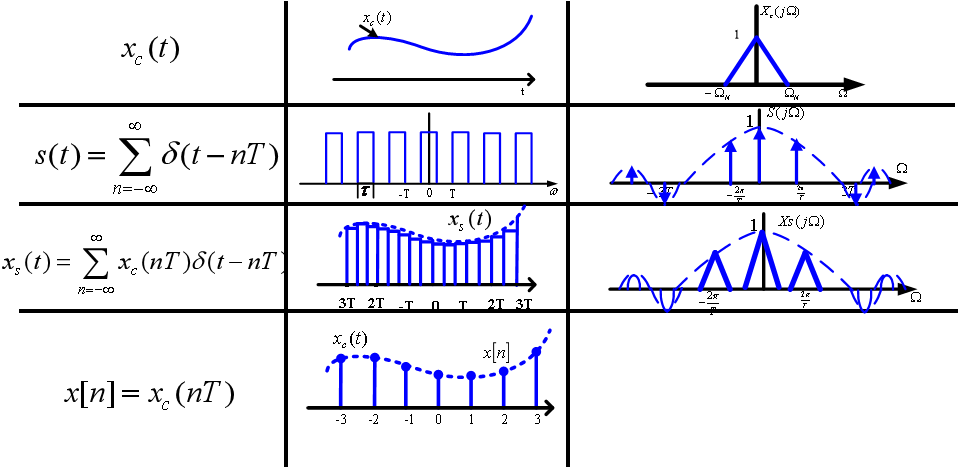
连续时间信号的采样
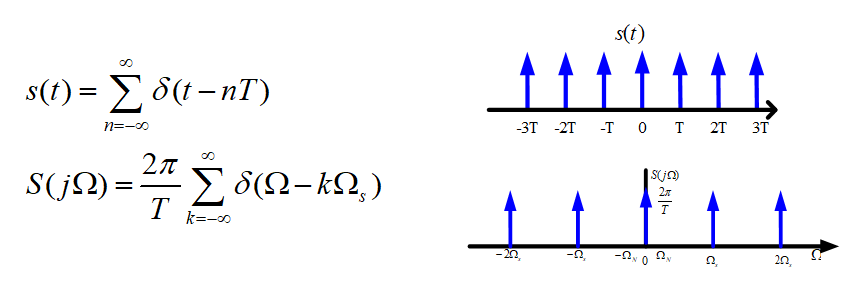
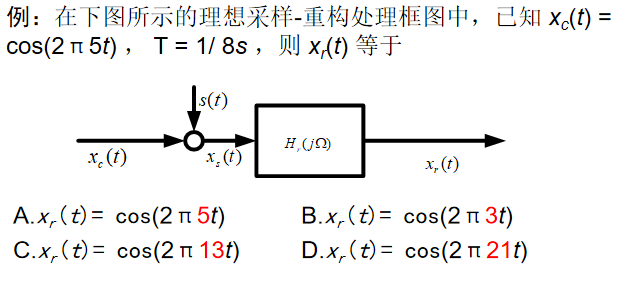
理想周期采样
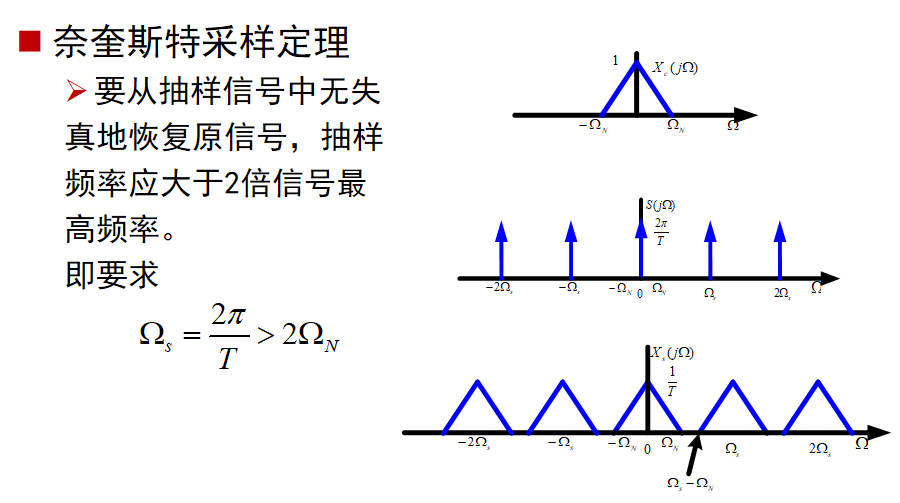
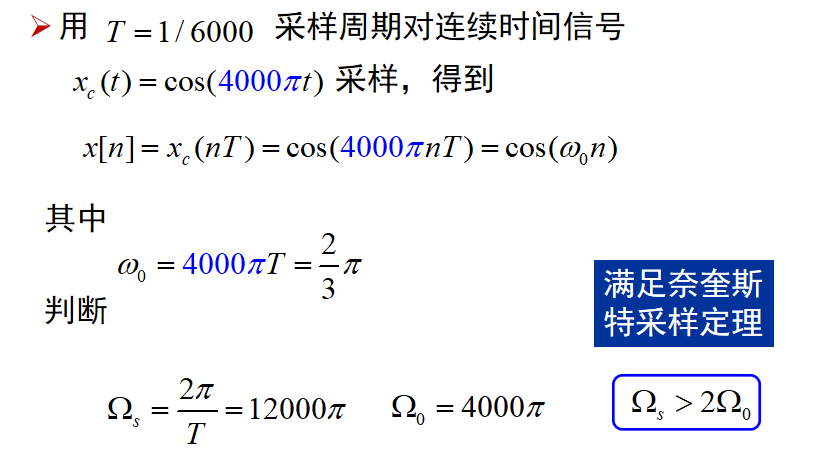
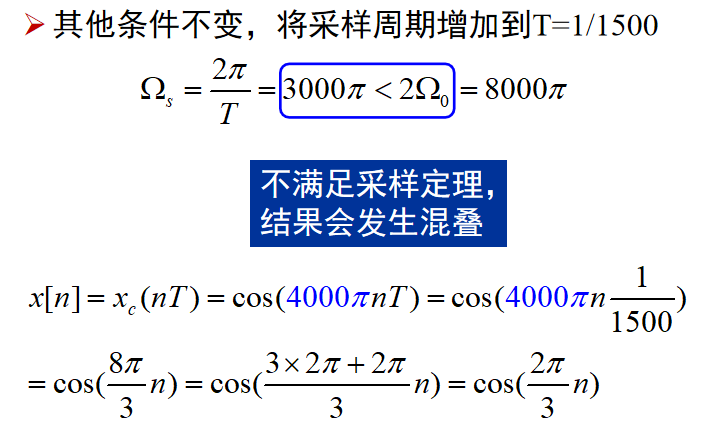
Nyquist采样定理
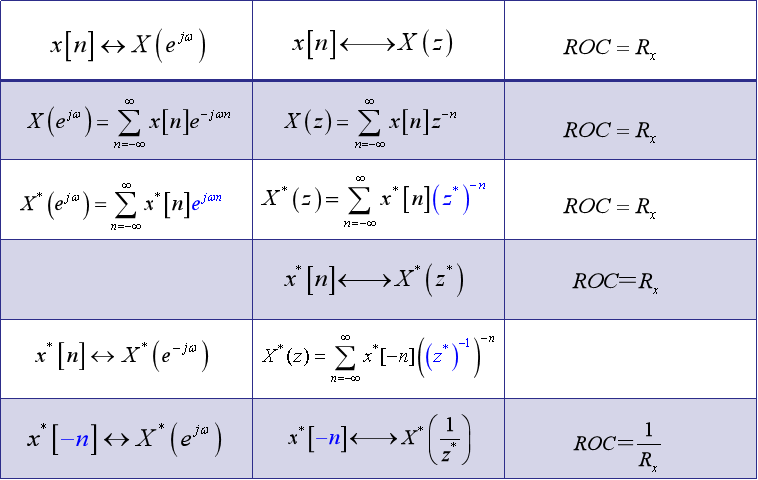
Z变换
Z变换及其收敛域
双边Z变换:
单边Z变换:
即傅里叶变换是Z变换的特例
收敛域:
1、序列的Z变换不是对所有序列都收敛
2、对给定的序列,使Z变换收敛的那一级Z值称为收敛域,缩写为ROC
3、Z变换收敛条件:
表示方法:
1、级数形式
2、解析表达式(注意只表示收敛域上的函数,同时要注明收敛域)
线性实系数差分方程
由代数基本定理可得出对于实系数差分方程其零点(极点)为实数或者成对出现的共轭复数
变换域的性质:
1、ROC在Z平面时中心在原点的圆环或圆盘
2、当且仅当 x[n] 的Z变换的 ROC 包括单位圆时,x[n] 的傅里叶变换才绝对收敛
3、ROC不能包括任何极点
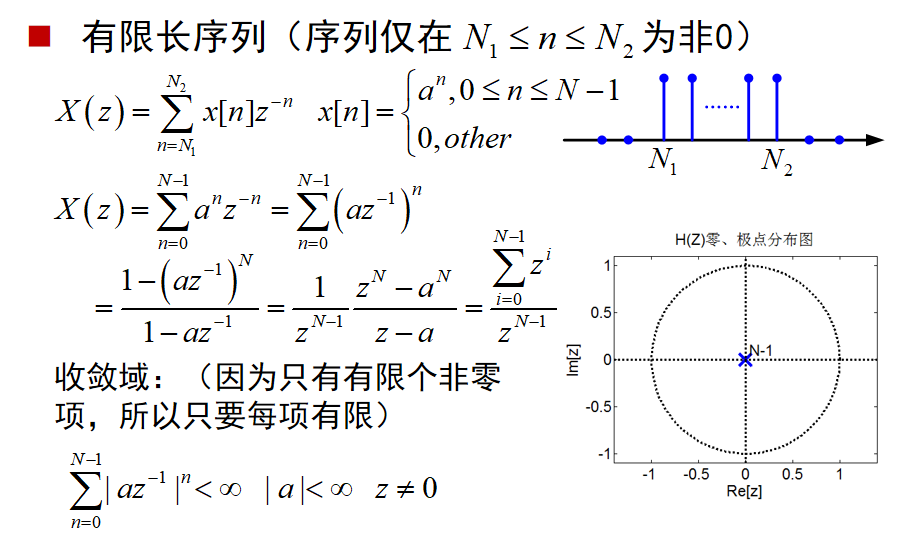
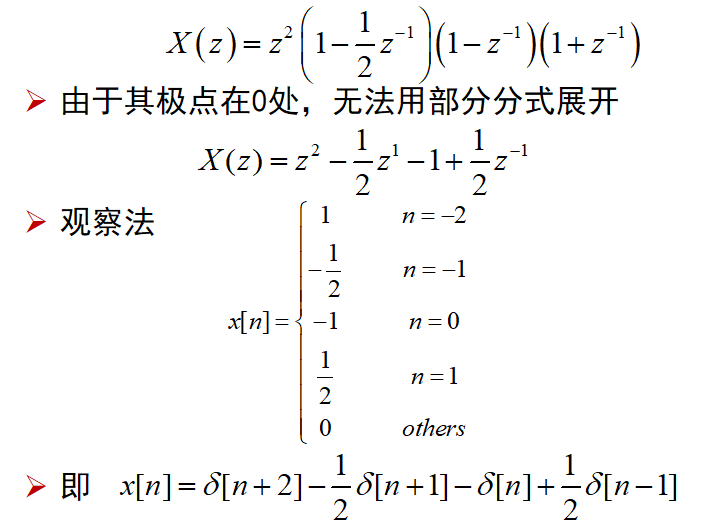
4、若 x[n] 是一个有限长序列,其 ROC 就是除 z=0 或 z=∞ 的整个Z平面
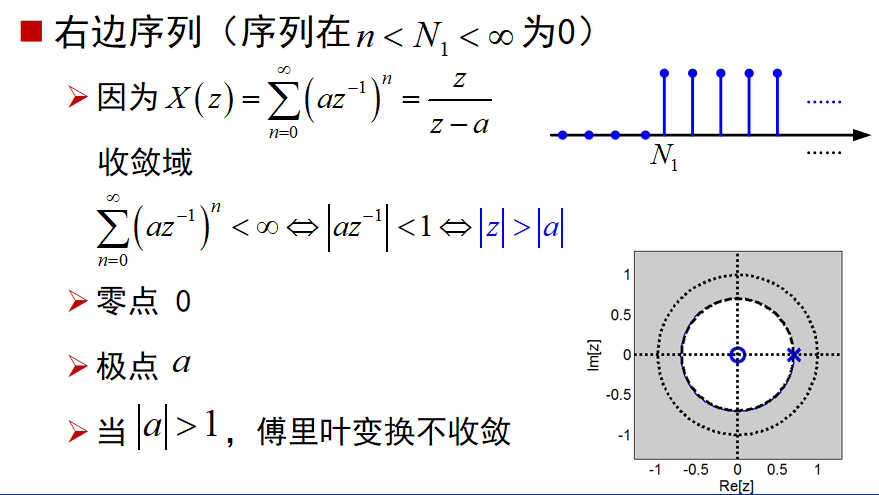
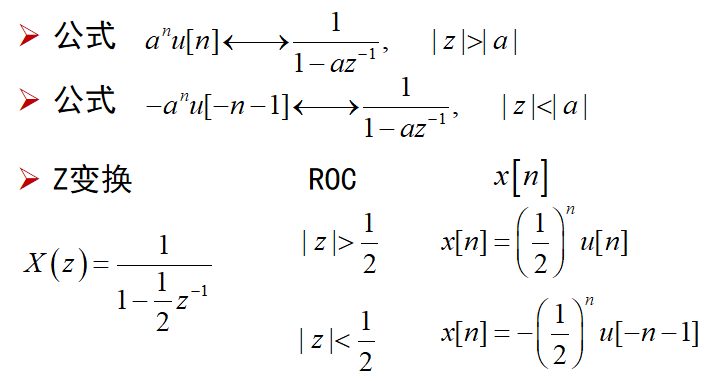
5、若 x[n] 是一个右边序列,其 ROC 是从 x[n] 最外面(幅度最大)的有限极点向外延伸至(可能包括) z=∞
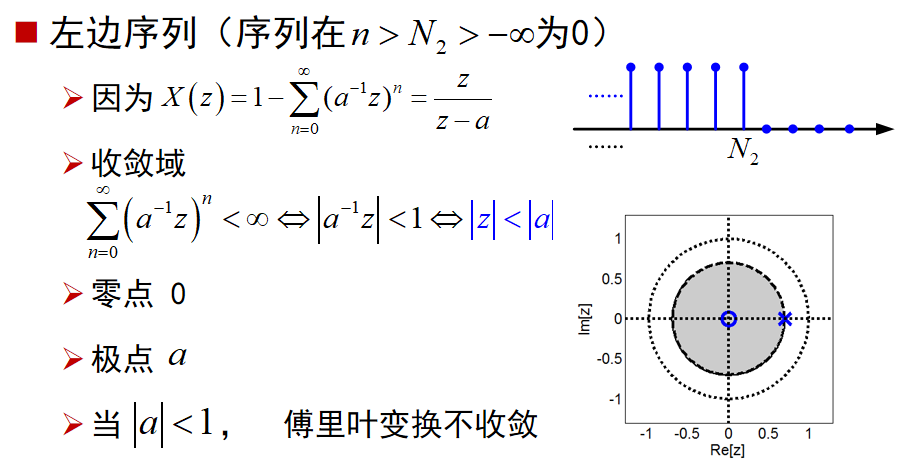
6、若 x[n] 是一个左边序列,其ROC是从 x[n] 的 X(z) 的最里面(幅度最小)的有限极点向内延伸至(可能包括) z=0
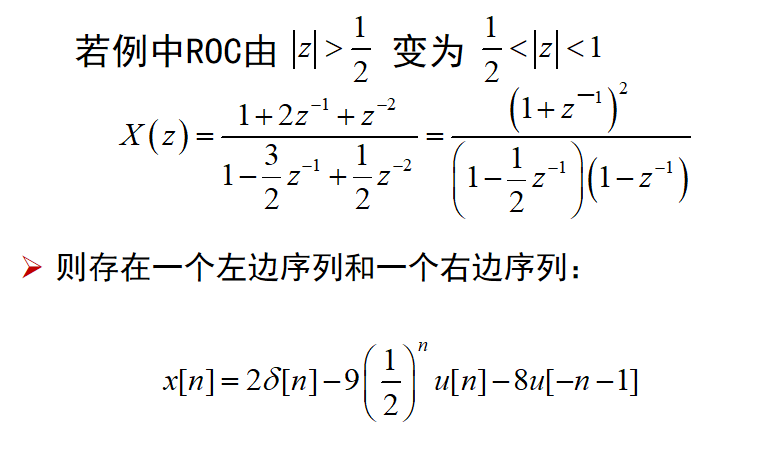
7、一个 双边序列 可看作一个 左边序列 和一个 右边序列 之和,因此,双边Z变换的收敛域是这两个序列Z变换收敛域的公共部分
8、ROC是一个连通域
系统函数的收敛域与稳定性、因果性的关系
稳定性、因果性和系统函数的ROC
稳定性(当且仅当每一个有界的输入序列都产生一个有界的输出序列,称为BIBO稳定):
因果性(对每一个选取的 n0 ,输出序列在 n=n0 的值仅仅取决于输入序列在 n<=n0 的值):
Z反变换及性质
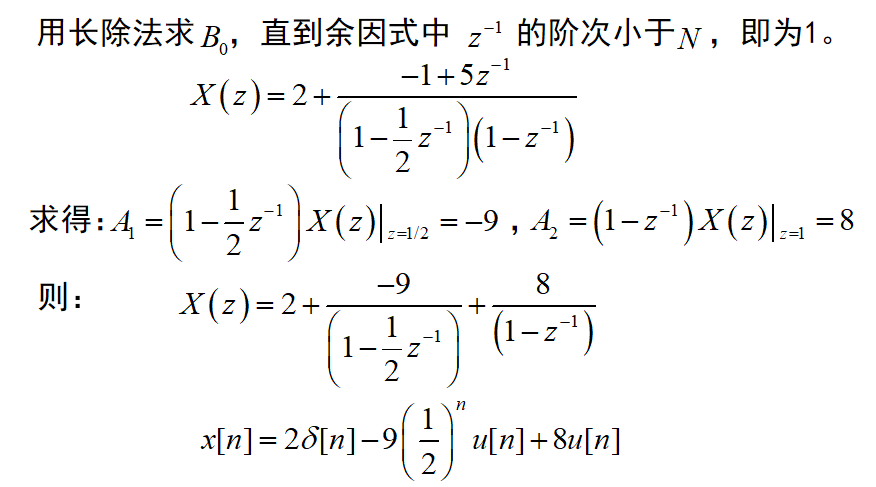
观察法:
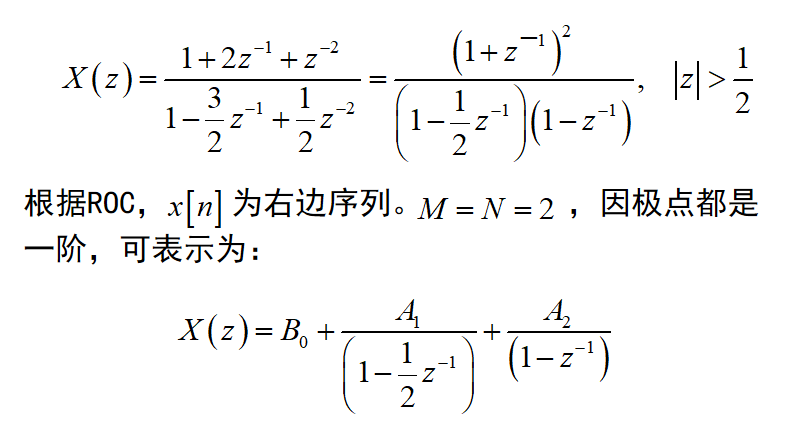
部分分式展开法:
幂级数展开法:
性质:
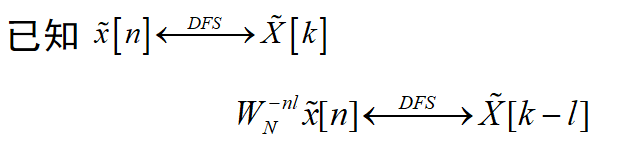
已知:



线性:
1、组合后序列的极点由 X1(z) 和 X2(z) 的极点组成
2、有可能出现零极点对消,从而扩大收敛域
时移:


微分:

共轭:

时间倒置:

卷积:

初值定理:
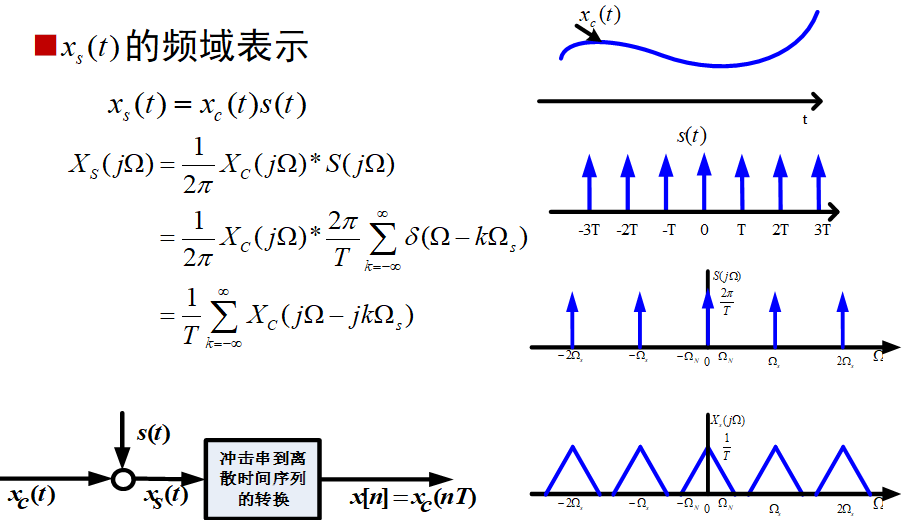
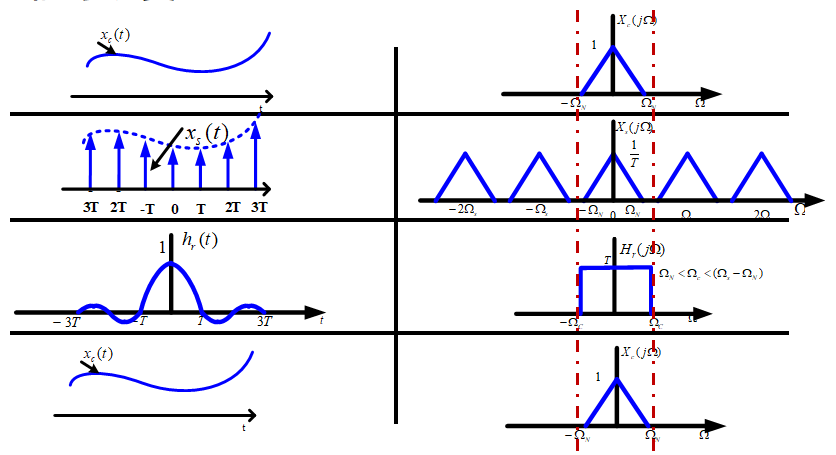
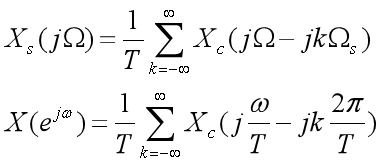
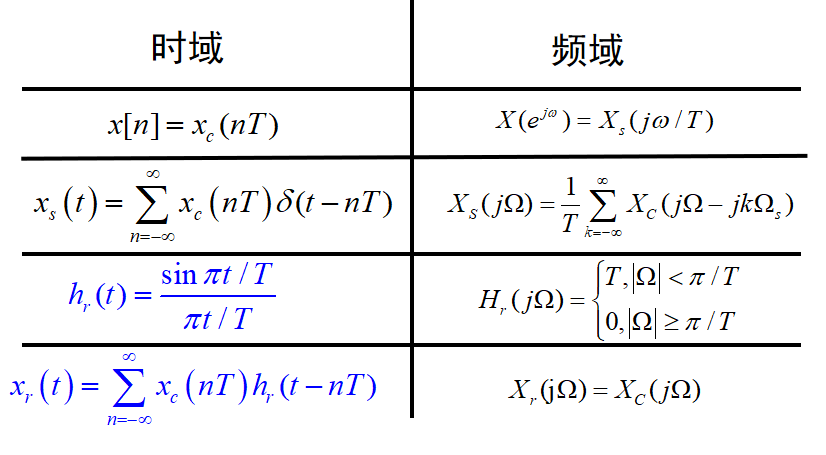
采样的频域表示与恢复
从频域恢复连续时间信号的频谱:
进行傅里叶变换得:
 :这种尺度变换可以被认为是一种频率轴的归一化,以使得 Ω 中的 Ωs 归一化到 ω=2π
:这种尺度变换可以被认为是一种频率轴的归一化,以使得 Ω 中的 Ωs 归一化到 ω=2π
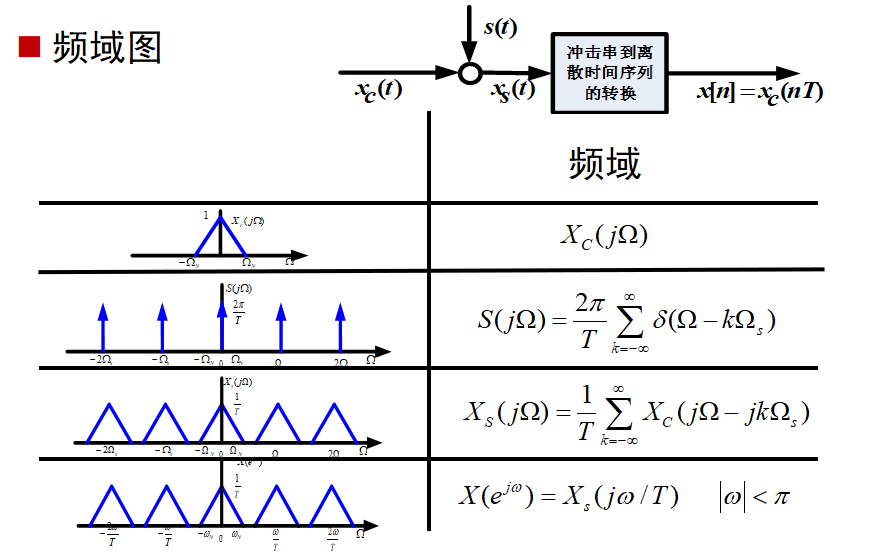
建立连续角频率Ω 、数字角频率ω间尺度变换关系:
ƒ 和 Ω 分别表示 模拟频率 与 模拟角频率 。单位为赫兹(Hz)和弧度/秒(rad/s),两者关系为:Ω = 2πƒ
ω 单位为弧度(rad)。模拟频率与离散(信号数字)频率之间的关系:ω=ΩT=2πƒ/ƒs **,主值范围 **[0, 2π)
模拟系统非带限时,离散时间处理是对原来的近似,采样频率越大,离散时间系统描述的频谱范围越宽,近似程度也越好
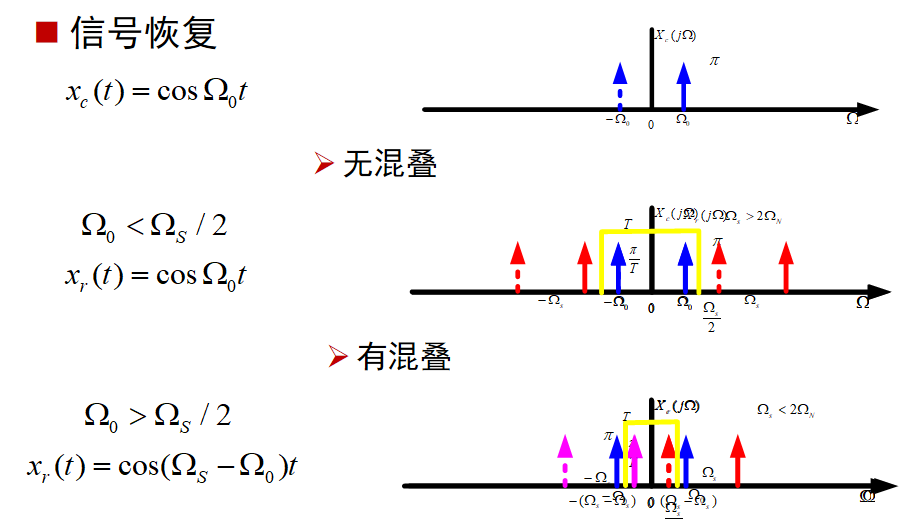
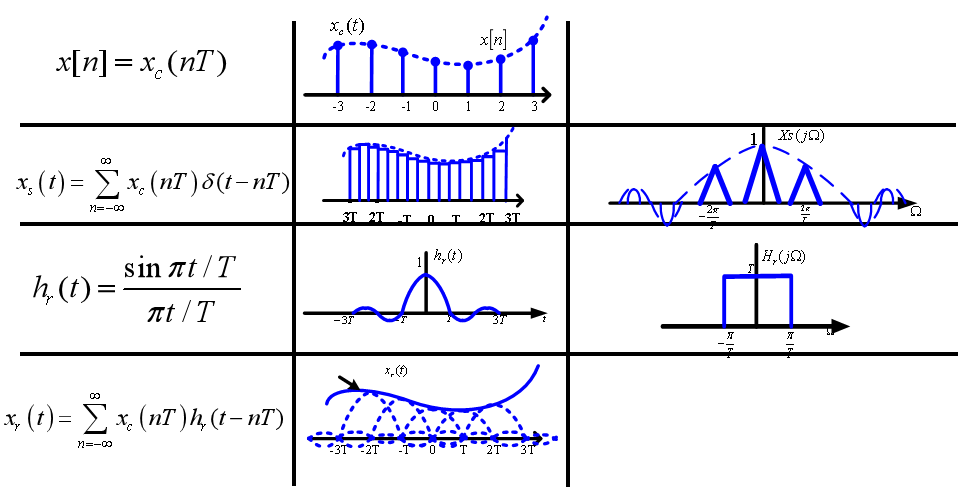
由样本重构带限信号
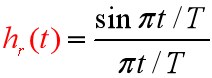
理想重构滤波器的单位冲激响应
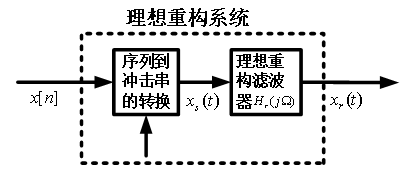

如果不存在混叠,低通滤波器就内插出样本之间的准确值
输入带限信号输出也为带限信号。
低通滤波器的截止频率一般取 Ωs /2 = π / T
离散时间系统设计 - 初步
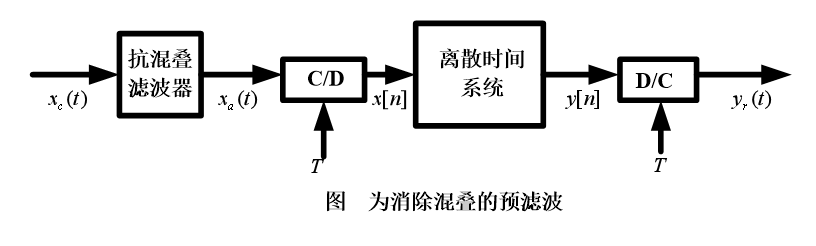
采样前的抗混叠滤波器
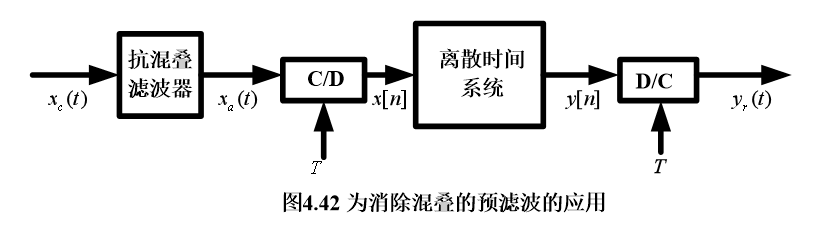
离散时间系统的处理流程
采样:
重构:
实际处理流程:
利用离散时间处理改变采样率:
改变采样率可以通过离散信号连续处理(模拟)的方法,也可以利用其离散域的性质在离散域得到。
根据采样率的增减变化可分为:采样率压缩器(压缩器)、采样率扩展器(扩展器)
也可分为:采样率按整数变换、按非整数变换
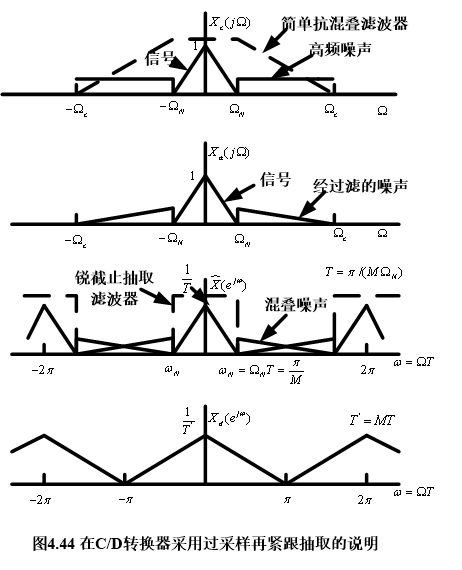
采样率按整数因子减小:

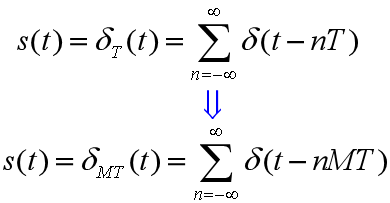
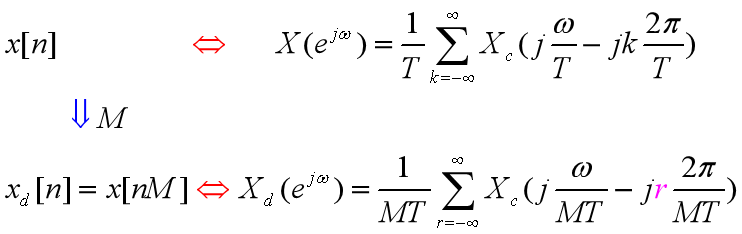
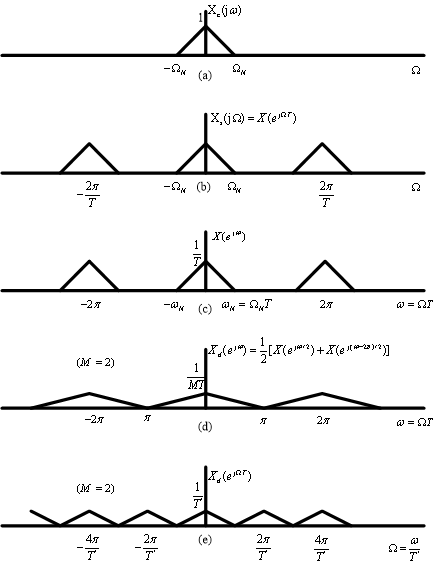
图4.22(d)~(f)具有为避免混叠的预滤波的减采样:
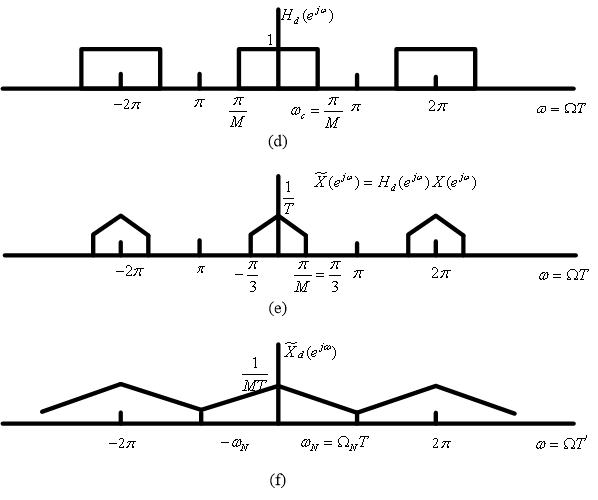
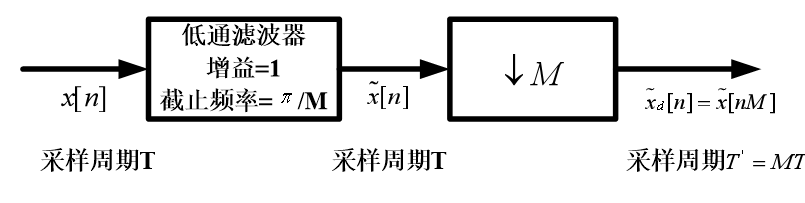
抽取器:
采样率按整数因子增加:

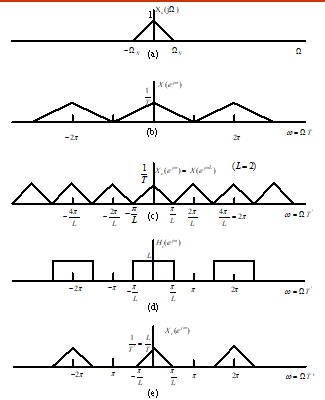
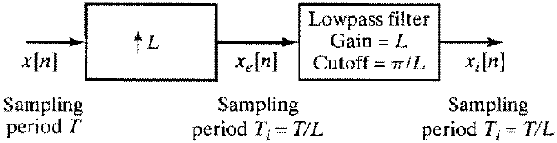
内插器:
消除混叠的预滤波
实际:所采样的信号=有用信号 + 宽带噪声
要求滤波器是锐截至的,单其实现起来比较困难,且成本昂贵,有了数字信号处理技术,可以用简单的滤波器,便可以实现
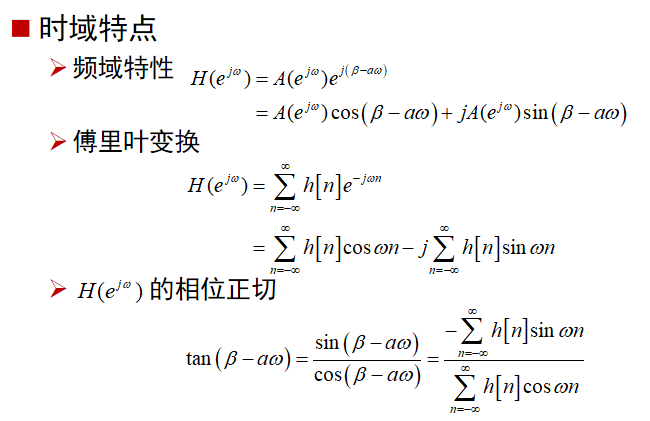
LTI系统的频率响应
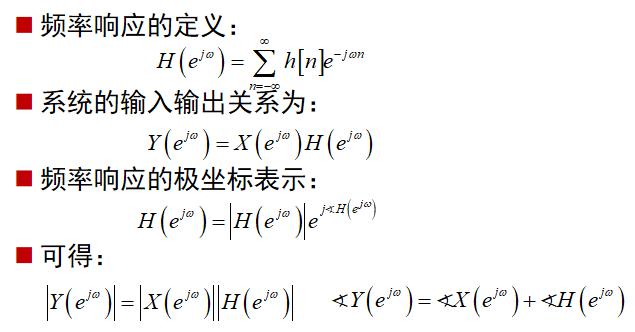
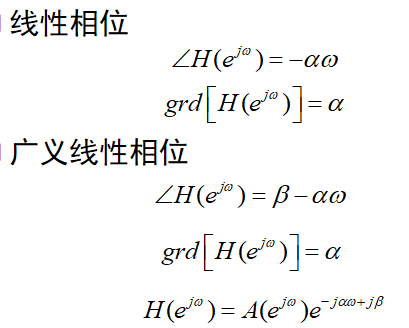
选频滤波器的指标(幅度、相位、群延迟)
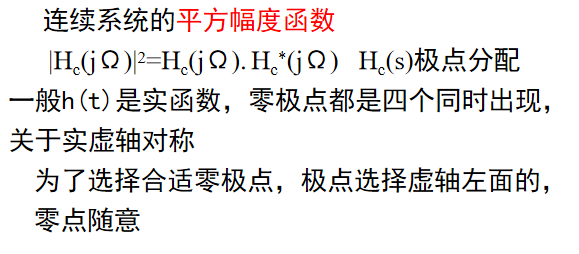
幅度平方响应:

相位响应:
群延迟:
对相位特性线性程度的一种度量,理解成对信号所有频率成分在时域上的延时,线性相位系统的群延时是常数,相当于所有成分都延迟了相同的时间,对信号波形没有产生影响。
群延迟可以看成是由各种频率的波叠加构成的一个波包络,群延迟就是包络的延迟,当群延迟为一恒定值时,包络的形状就不会发生变化,无失真;反之,则各个频率的波延迟不同,组成的波包络形状发生变化,造成失真
LTI系统的差分方程表示
逆系统、FIR系统、IIR系统
稳定性:
收敛域包含单位圆
因果性:
右边序列(收敛域包含)
逆系统:(零点变成极点,极点变成零点)
若 H(z)Y(z)=1 ,则此二系统互为 逆系统
特点:
系统与其逆系统级联后,总的系统响应为1
逆系统的幅度响应为原来系统的倒数
相位响应和群延迟为原来值的相反数
不是所有的系统都存在逆系统,例:低通滤波器不存在逆系统
最小相位系统:
当且仅当H(z)的零点和极点都在单位圆内时,一个稳定因果的线性时不变系统也有一个稳定因果的逆系统,这样的系统称为最小相位系统
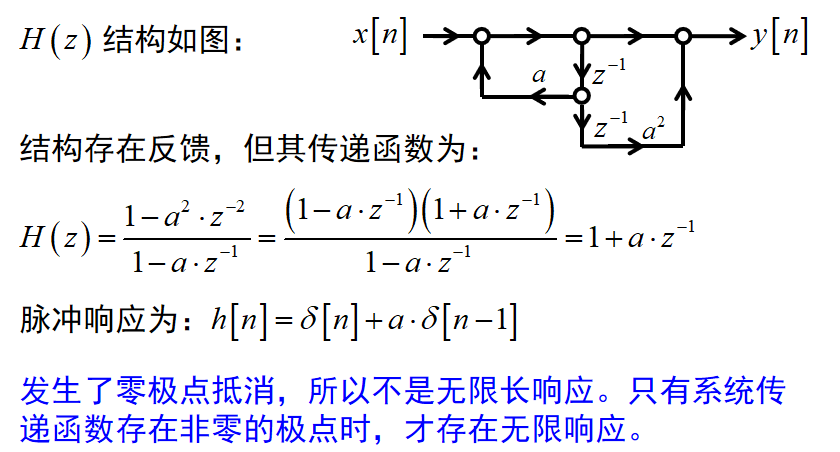
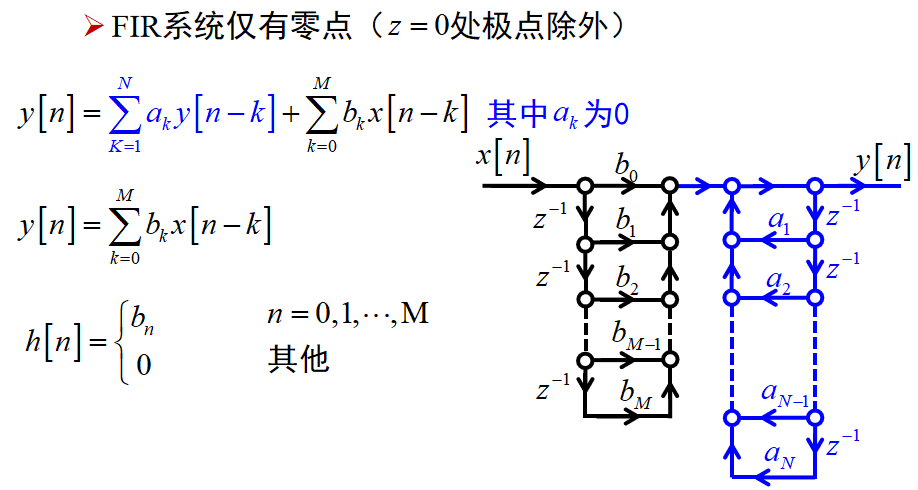
FIR系统:
h[n] 是有限长的(只有前面的有限个累加项),没有非零极点
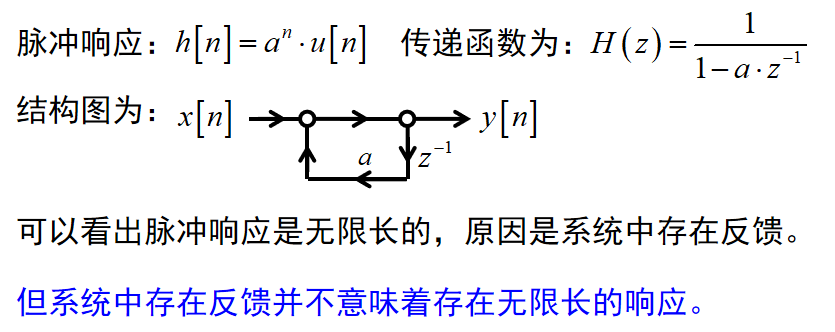
IIR系统:
h[n] 是无限长的,有非零极点
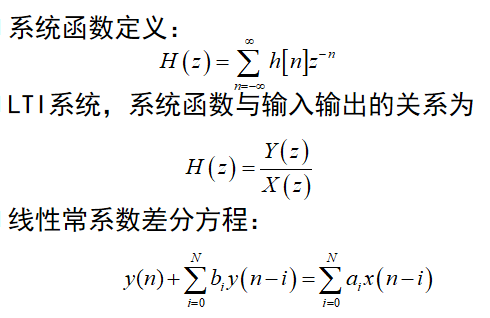
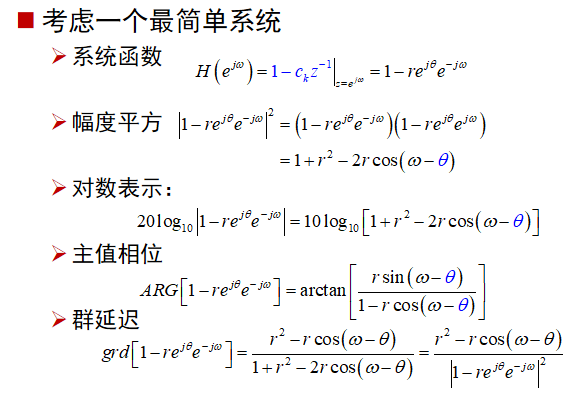
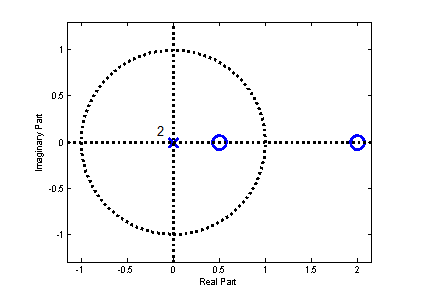
几何法确定单个零点提供的频率响应
对相位响应而言,零点因式提供的是加号,极点因式提供的是减号
(a)某一系统函数在单位圆上求值的连续相位曲线
(b)相位曲线的主值
(c)为得到 arg[H(e^jw^)] ,需要在 ARG[H(e^jw^)] 上加的 2π 倍数
群延迟的算法:

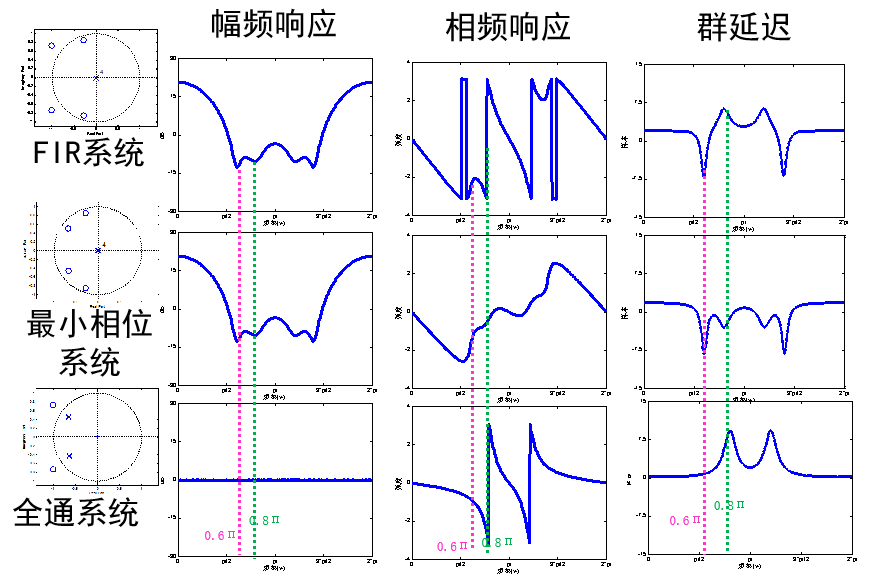
幅度响应与相位响应之间的关系
幅度响应与相位响应之间的关系
任何给定的系统总有一个另一个系统的幅度响应与之相同,但相频响应不同
幅度平方可表示为:

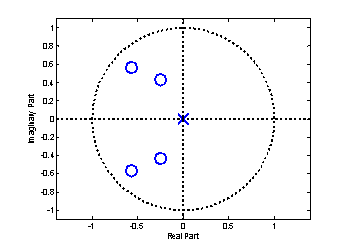
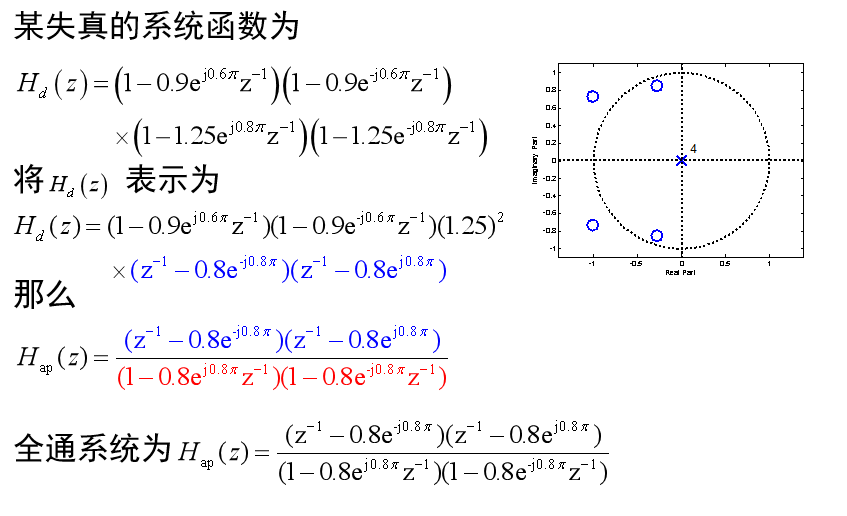
全通系统的零极点分布、相位响应、群延迟特性
当系统的幅频响应满足下式时,为全通系统:
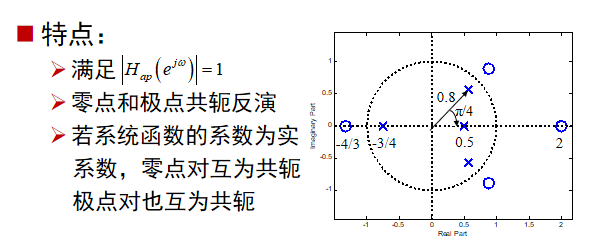
每一个极点都有一个与之配对的共轭倒数零点。
作用:
①延迟均衡器,补偿相位失真
②幅度失真
最小相位系统
定义:
当且仅当 H(z) 的零点和极点都在单位圆内时,一个稳定因果的线性时不变系统也有一个稳定因果的逆系统,这样的系统称为最小相位系统。
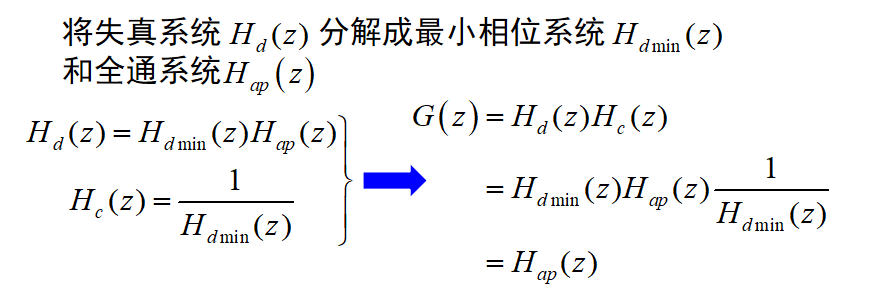
最小相位与全通分解
任何有理系统函数都可写成:

其中包含最小相位系统和全通系统
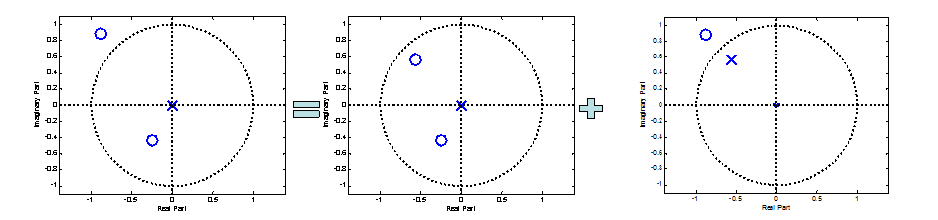
有理系统函数H(z)因式分解,分离出相应的单位圆外的零点,该零点被一个全通系统所吸收。全通系统为原系统提供一个单位圆内的零点,该零点也是全通系统的极点
最小相位的应用及线性相位的引入
最小相位、全通分解 → 频率响应的补偿
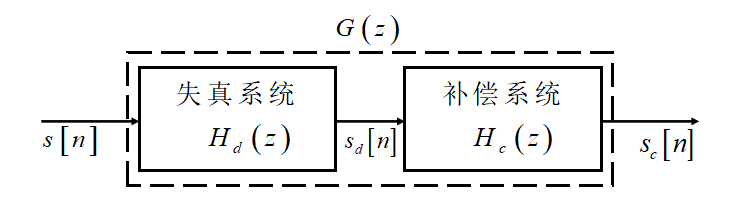
若能实现完全补偿,那么 sc[n] = s[n] ,即 Hd(z) 与 Hc(z) 互为逆系统
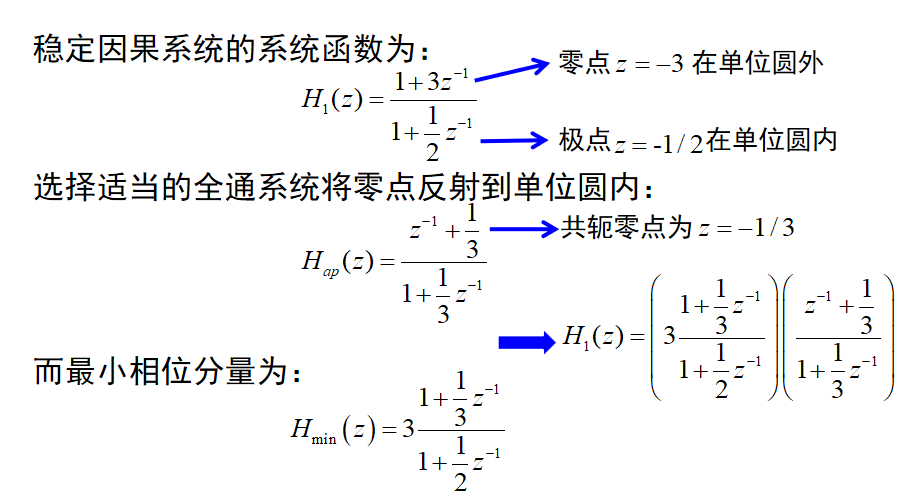
若失真系统是稳定、因果的,并且要求补偿系统也是稳定、因果的,那么只有当 Hd(z) 是最小相位系统,且有一个稳定、因果的逆系统,才能完全补偿
eg:
最小相位系统(相位滞后、能量滞后、群延迟)
线性相位系统h[n]对称性的引入

当 a 为整数时,单位脉冲响应对 n=a 是对称的,否则不对称
四类因果广义线性相位系统
广义线性相位系统的 h[n] 需满足的条件
尽管 h[n] 关于M/2对称是广义线性相位的充分条件
具有 有理系统函数 的因果系统,要使它具有 线性相位 ,须为 有限长FIR
四类因果广义线性相位系统
利用广义线性系统关于 M/2 对称,故 n>M 时等于 n<0 ,所以序列长度为 M+1
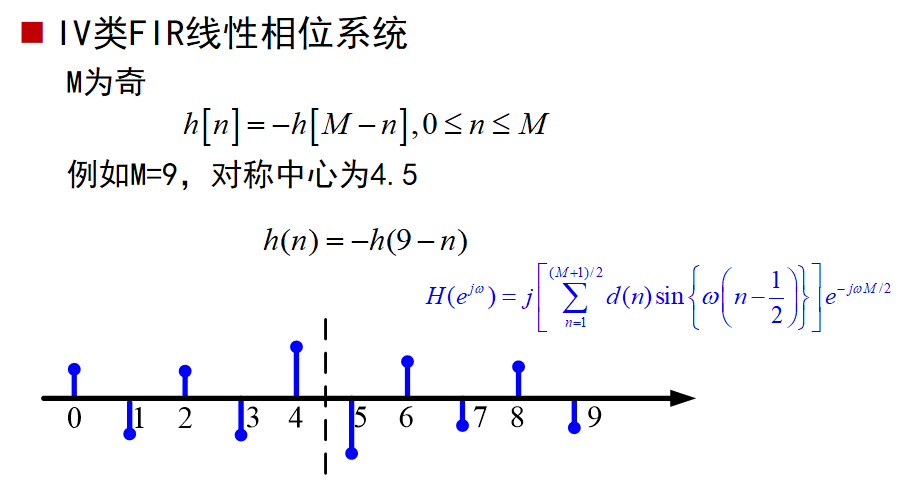
M分为 偶数和奇数,h[n] 是 奇函数(β=π/2或3π/2) 和 偶函数(β=0或π) 有 四种线性相位
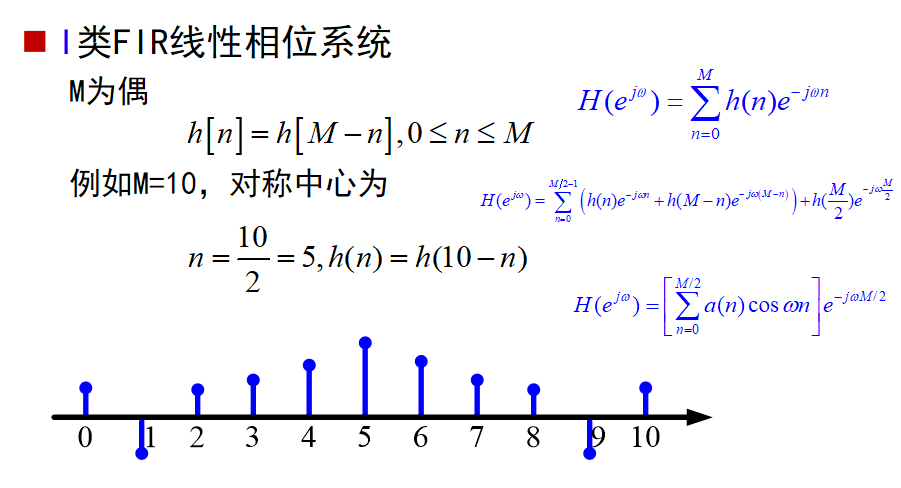
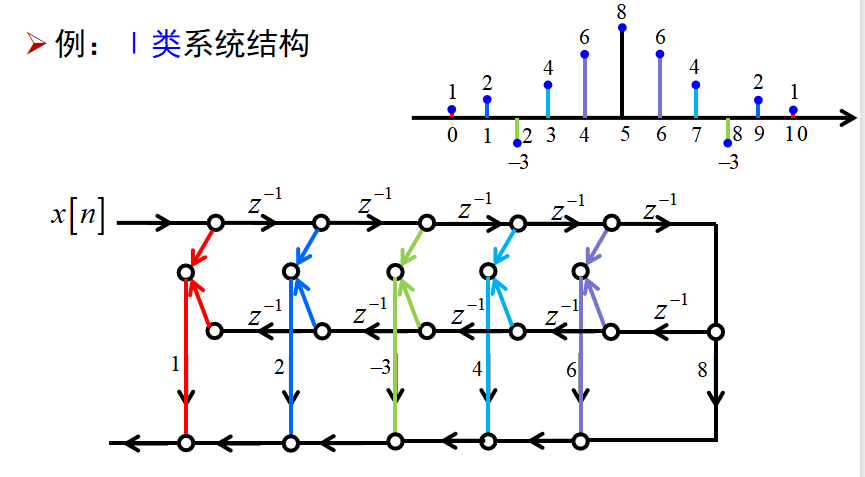
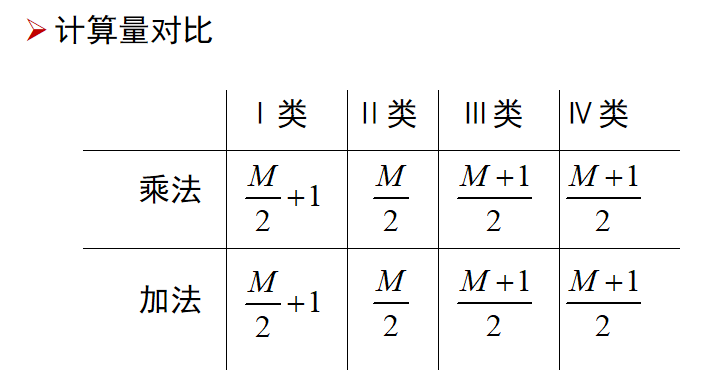
I类FIR线性相位系统:
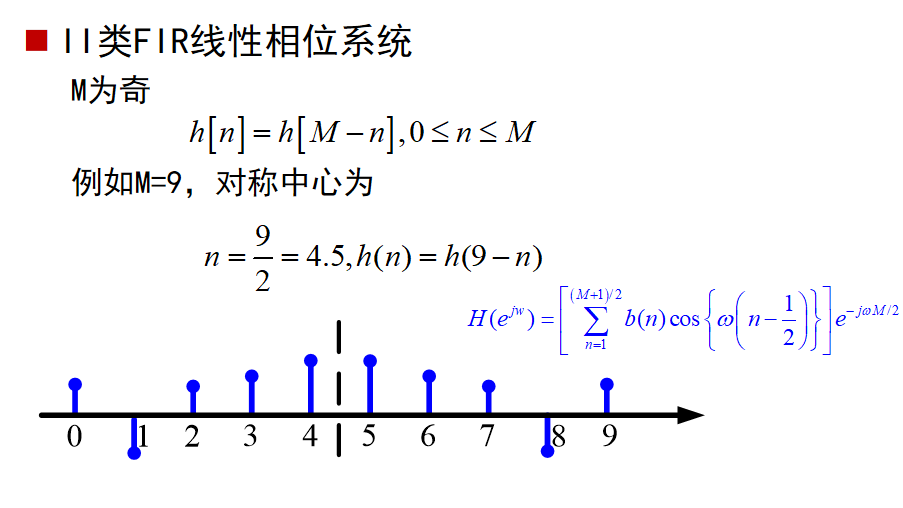
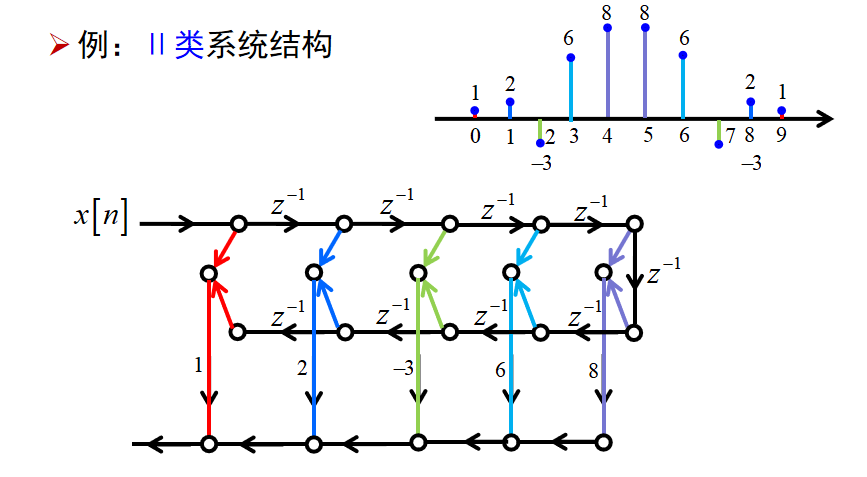
II类FIR线性相位系统:
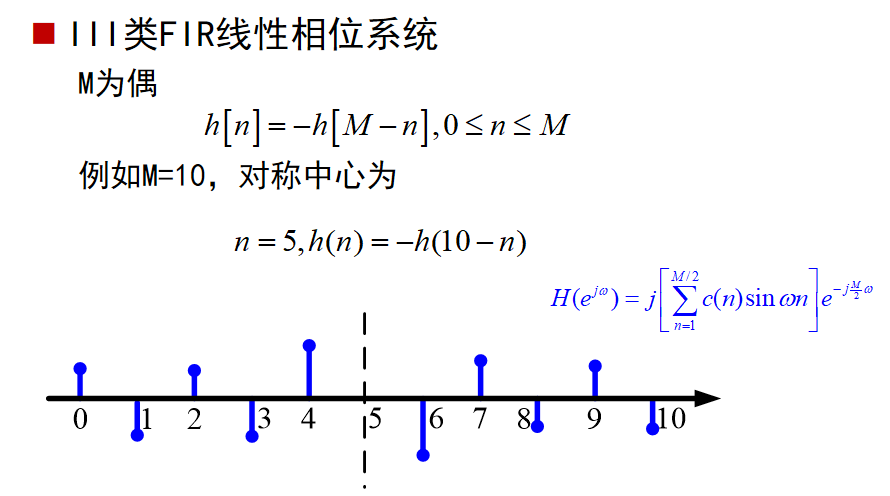
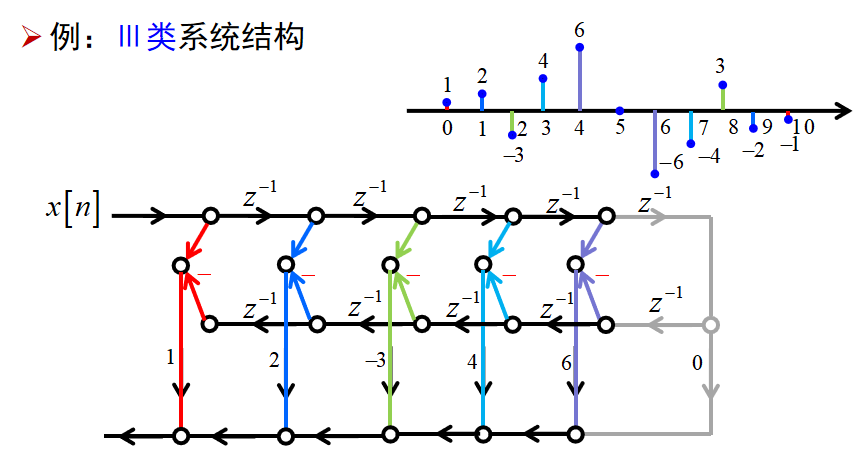
III类FIR线性相位系统:
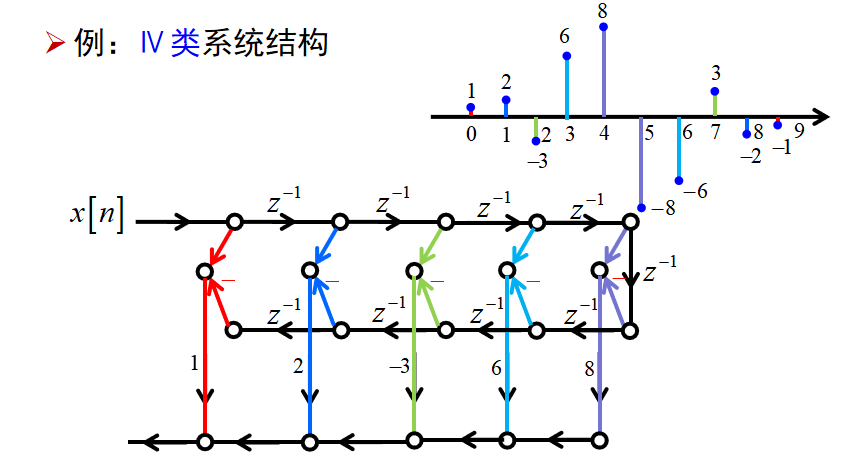
IV类FIR线性相位系统:
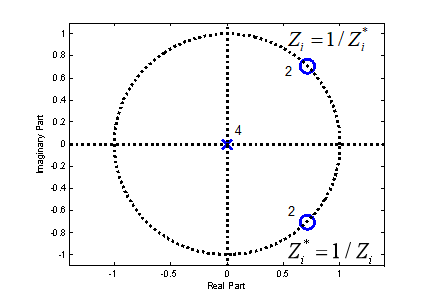
FIR线性相位系统的零点位置
FIR线性相位系统的零点位置
I、II类零点的分布规律:
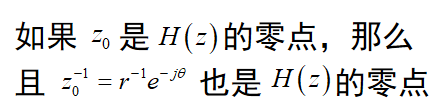
零点既不在实轴上,也不在单位圆上,则零点是互为共轭倒数的
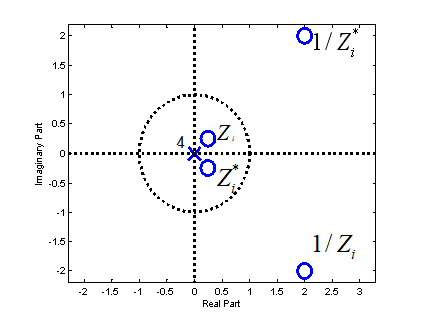
零点不在实轴上,在单位圆上,共轭对的倒数就是他们本身
零点在实轴上,不在单位圆上实数零点,没有共轭,只有倒数
零点既在实轴上,又在单位圆上此时只有一个零点,且有两种可能 ±1
M为偶数,只是恒等式;M为奇数,函数必有一个零点在 z=-1 II类
III、IV类系统零点的分布规律:
单位脉冲响应是反对称的:
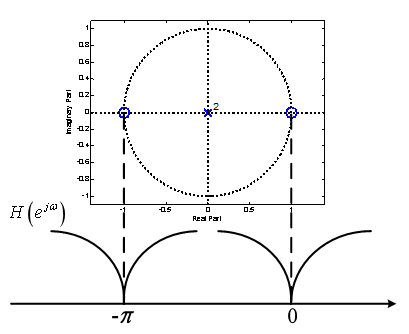
z=1 时,不论M为奇还是偶,必有 z=1 为零;
z= -1 时,若M-1为奇(M为偶,III类),此时必有 z=1 的零点。
小结:
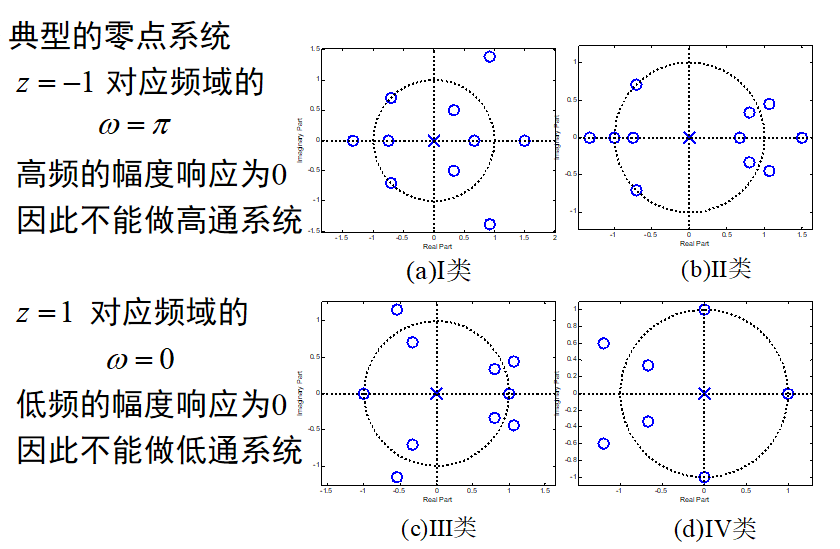
I类应用最广泛,可用于低通、高通、带通和带阻等;
II类不能用于高通、带阻;
III、IV类系数向量奇对称,累加后为0,抑制直流分量;
III类高频时幅频为0,零点还包括 (1+z^-1^) ;
III 、IV类零频处相位π/2 ,用于数字微分器、Hilbert变换器。
IIR系统的结构
直接型、级联型、并联型
离散时间系统结构
FIR滤波器——有限项,可通过卷积实现
IIR滤波器——无穷项,不可通过卷积实现
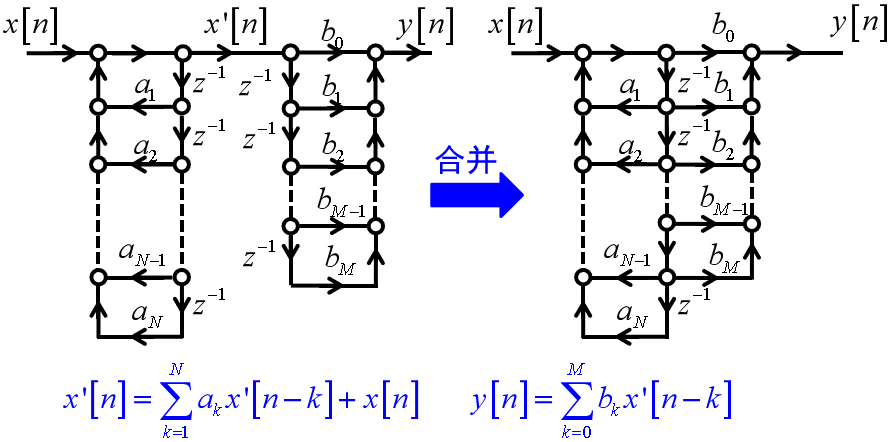
线性常系数差分方程的方框图表示

滤波器就是对输入序列 x[n] 进行一定的运算操作,从而得到输出序列 y[n] ,滤波器实现只需3种运算:乘法 、加法 和 单位延迟
乘法次数:N+M+1
加法次数:N+M
延迟次数:N+M
信号流图的基本概:
源节点就是没有流进支路的节点,也称输入节点
汇节点就是仅有流进支路的节点,也称输出节点
分支节点就是一个输入,一个或者一个以上输出的节点
相加节点就是有两个或两个以上输入的节点
第一个网络实现零点,第二个网络实现极点
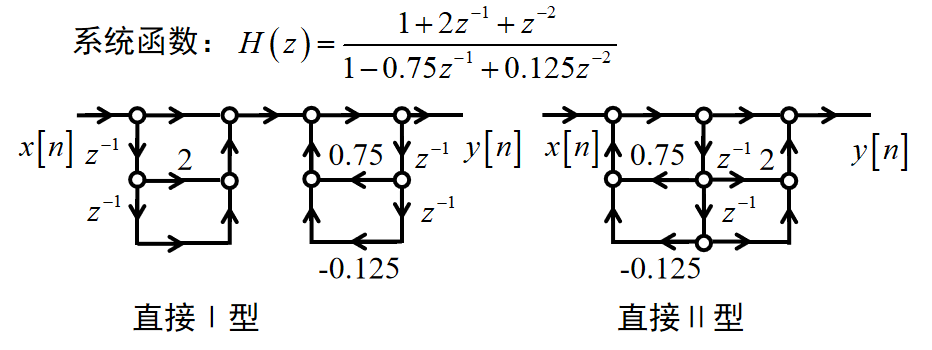
直接Ⅰ型:
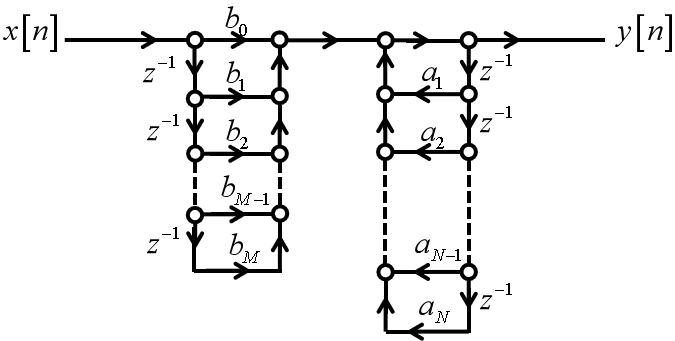
直接Ⅱ型:
同一种系统有不同的实现方法,其消耗资源的多少不同,我们需要的系统往往是资源和计算量最少的系统。
直接Ⅱ型也称为规范型,其延迟单元最少。
缺点:
①系数对性能的控制作用不明显;
②极点对ak的变化较为敏感。
eg:
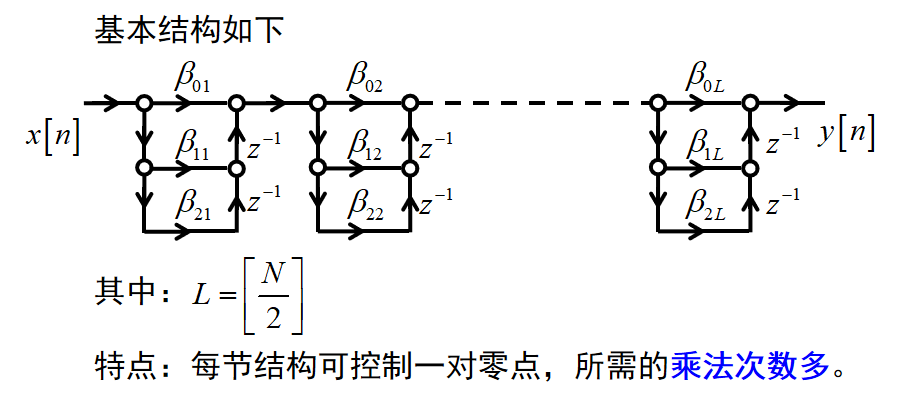
级联型:
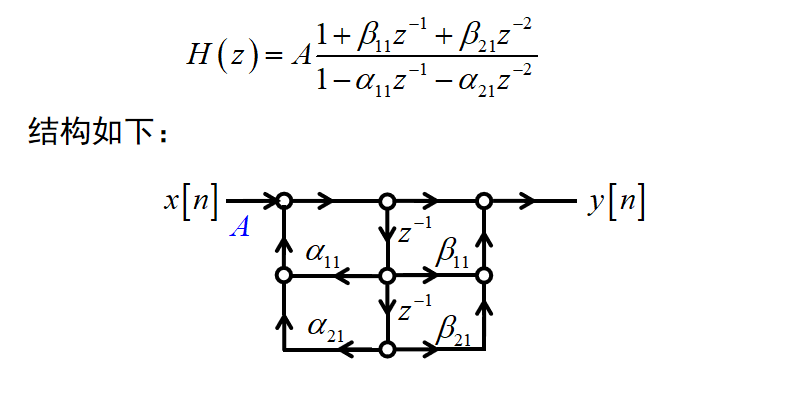
特点:β1k,β2k仅影响第k对零点,α1k,α2k仅影响第k对极点
优点:
①便于调节滤波器特性;
②运算累积误差比直接型小;
③相同结构的子网络结构,可以时分复用。
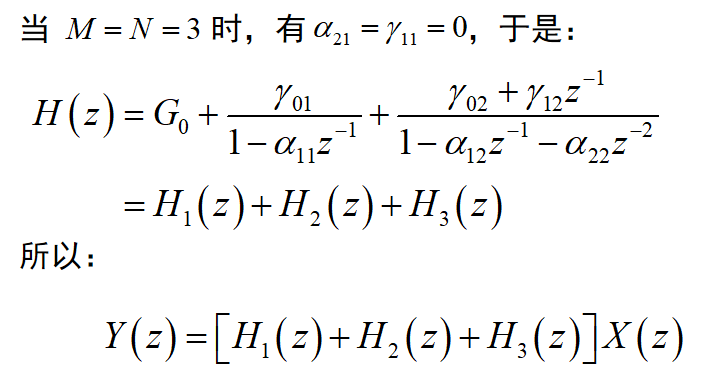
并联型:
当 M=N 时,将两个一阶实极点合为一项,将共轭极点化成实系数二阶多项式
优点:
①调整极点;
②运算累积误差小;
③并联,可同时对输入信号运算,速度最高,多核同步运行
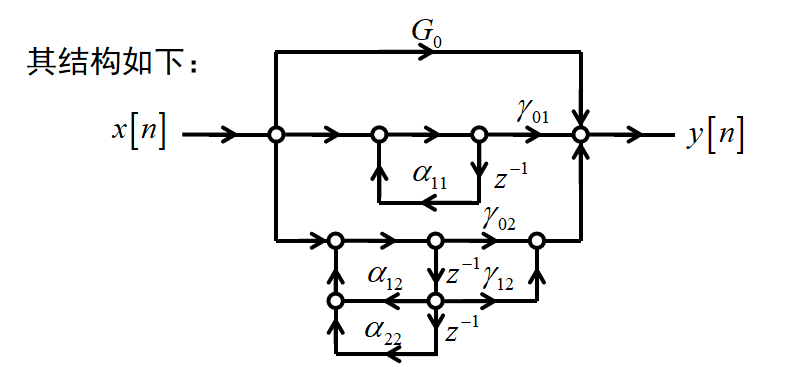
IIR系统的基本结构
IIR系统中的反馈
反馈回路:闭合路径,该路径从某一节点出发,以箭头方向穿过某些支路又回到该节点
IIR系统:存在反馈回路,但不是充分条件
转置型结构、FIR系统的结构
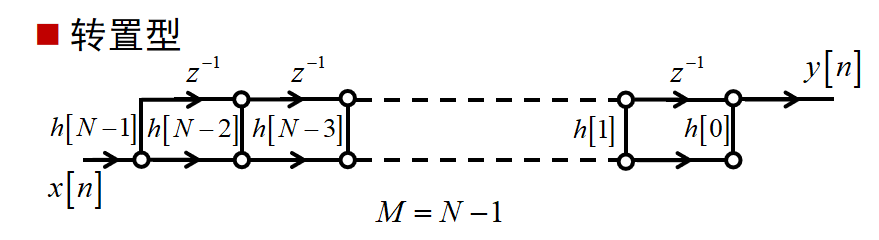
转置型结构
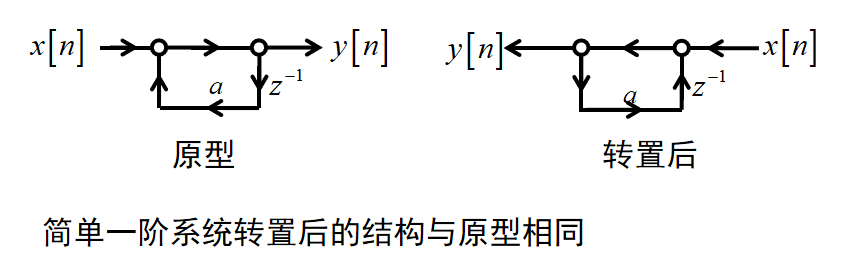
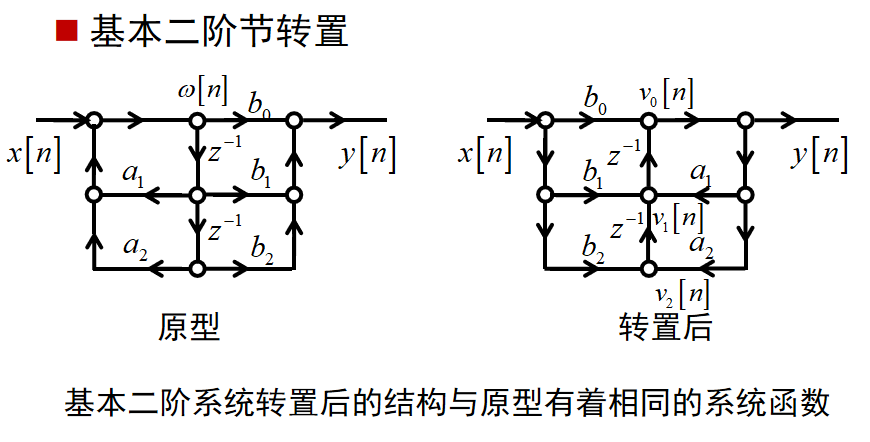
转置前后延迟支路数和系数的个数都不变
直接Ⅱ型结构先实现极点,而转置直接Ⅱ型先实现零点。
在使用有限精度数字实现量化时,存在差别。
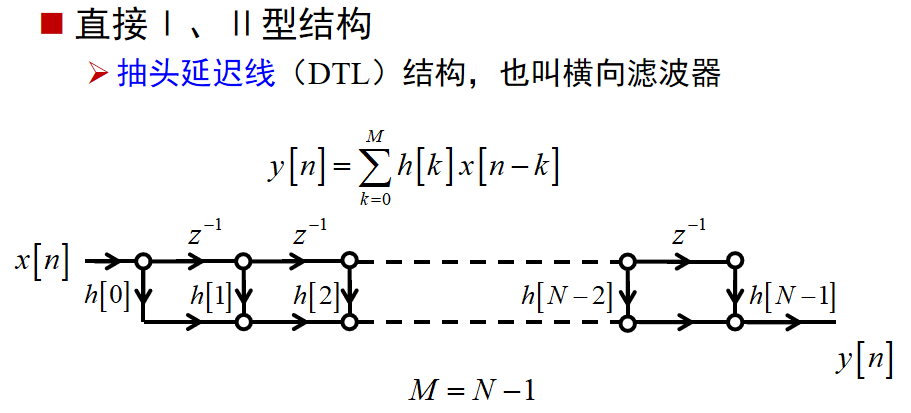
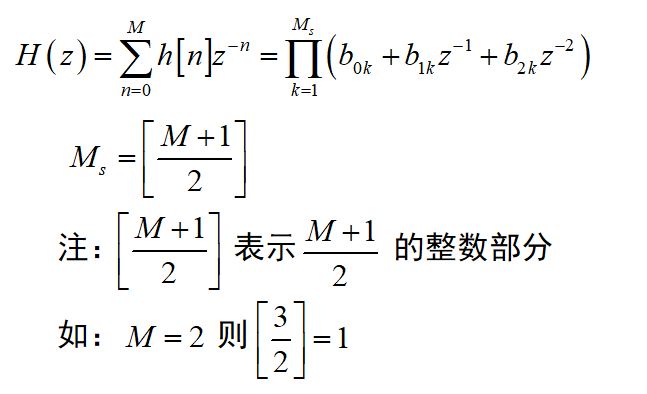
FIR系统的基本结构
直接型:
级联型:
线性相位FIR系统的结构:
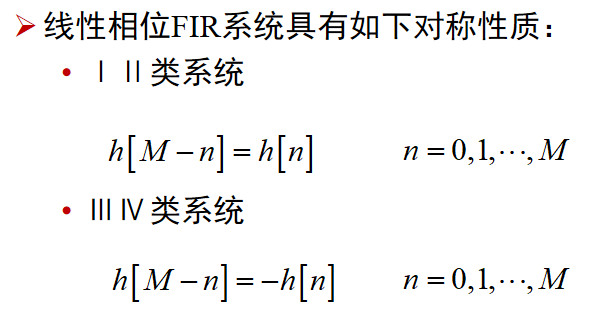
对称性可以使乘法器的数目减半
滤波器设计方法
选频滤波器
能让某些频率分量通过,而完全拒绝其他频率分量
广义滤波器
任何能对频率进行修正的系统(我们需要的是线性时不变的因果系统)
滤波器的设计步骤:
给出系统的性能指标,用因果离散时间系统逼近这些性能指标
频域的形式:低通、带通、高通、带阻
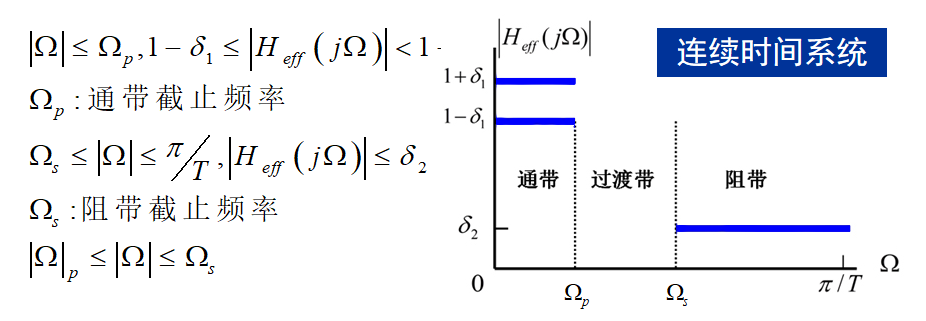
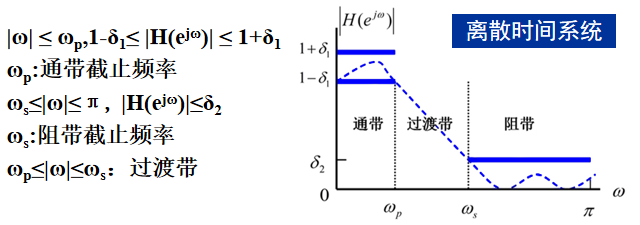
所示LTI连续系统,可通过 ω = ΩT 将有效连续时间滤波器的指标转换为离散时间滤波器的指标
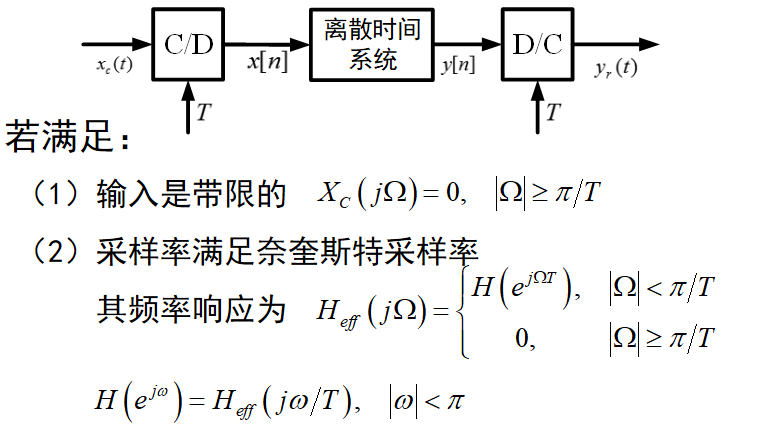
由连续时间滤波器设计离散时间IIR
利用数字计算的方法实现系统,该离散时间滤波器称为数字滤波器。
按照离散系统时域特性,可分为无限冲激响应(IIR) 和 有限冲激响应(FIR)
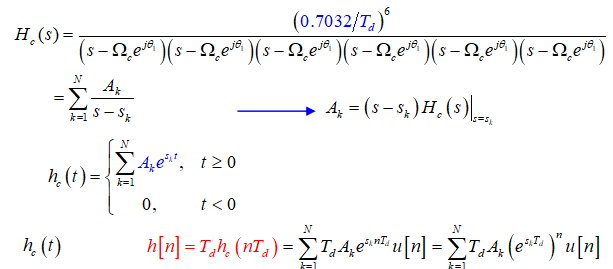
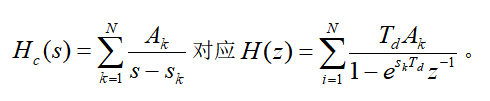
冲激响应不变法:
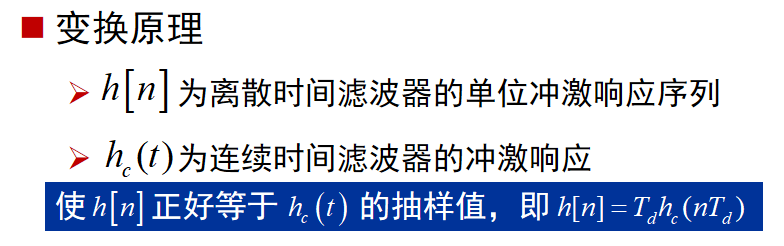
乘上Td 是为了在一个周期中与h[n] 的幅度相同;只要采样,就有可能产生频谱混叠
H(s) ?–> H(z) :z = e^st^
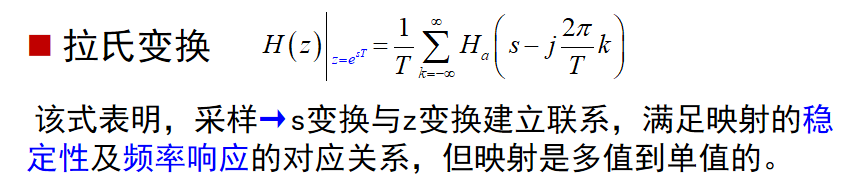
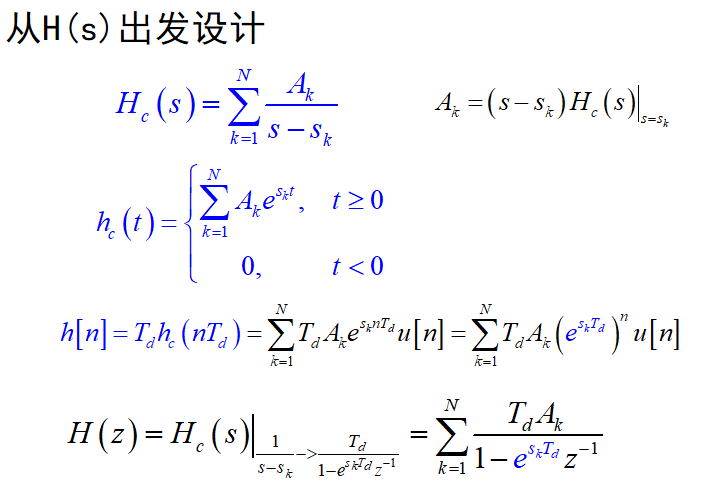
如果有极点是sk ,会被映射到e^skTd^ ,零点不满足这种对应关系
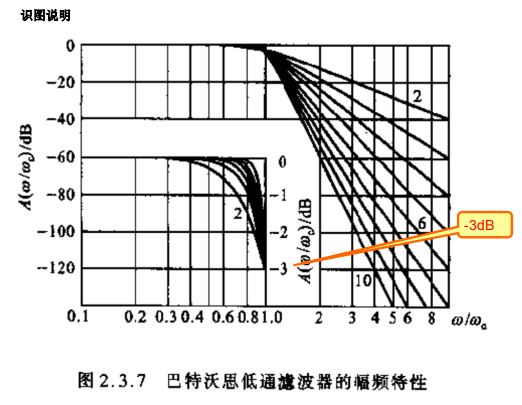
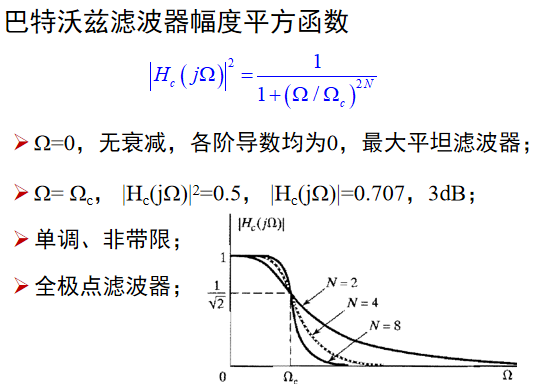
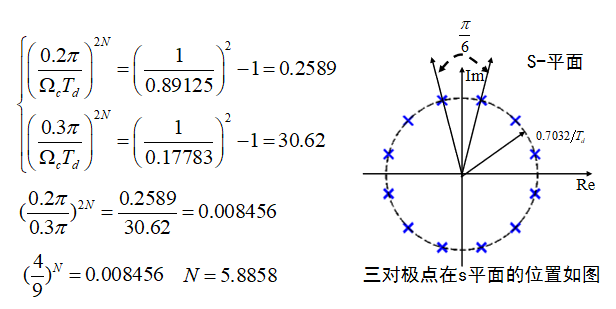
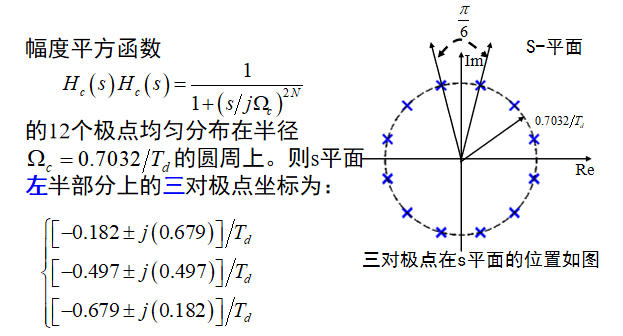
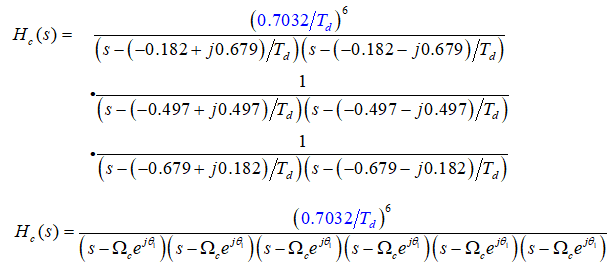
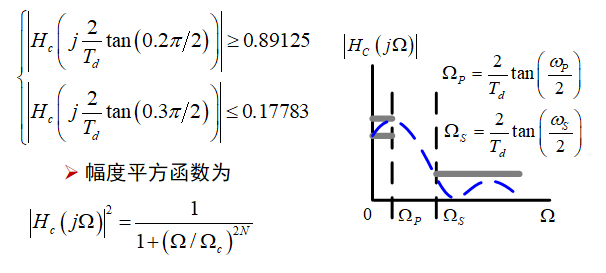
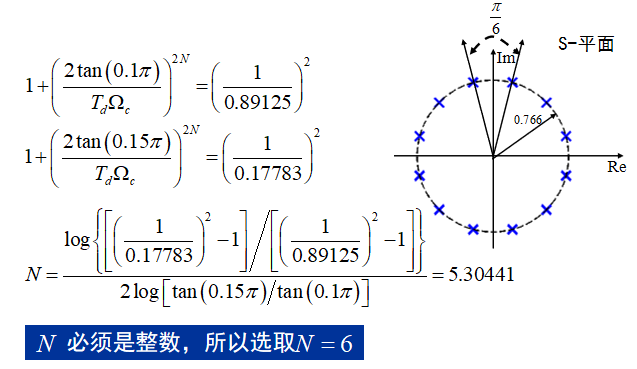
Buttworth滤波器设计及举例
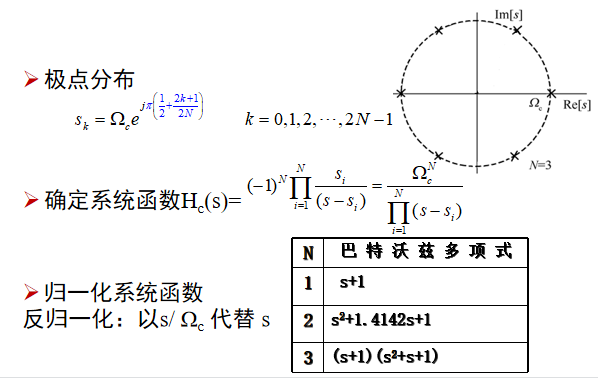
虚轴左面是N各点平分180°,例如N=3,分别为120°、180°、240°
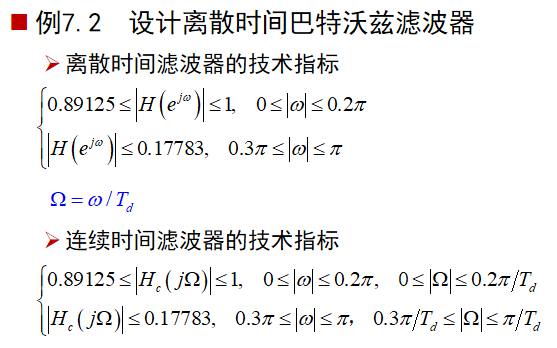
例题:
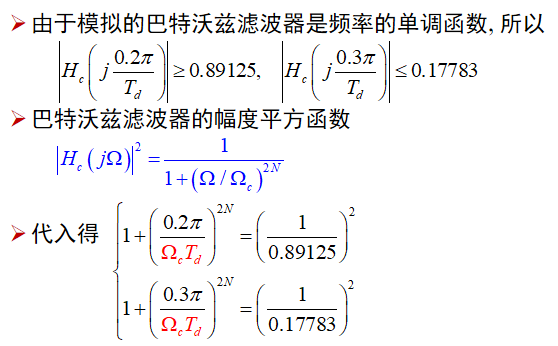
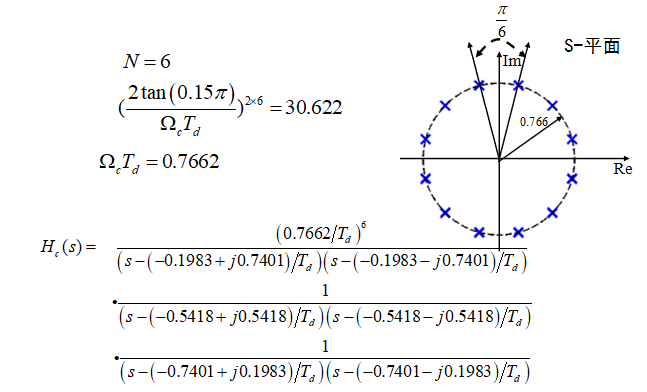
把N = 6代入通带 !!!可能会混叠,余量给阻带,N尽量大一些
Td 的作用:采样周期 Td 不影响滤波器的设计,不能控制混叠
若采样率增加(Td 减小),连续时间系统的截止频率必须成比例的增加
超标设计,尤其是阻带指标
采样周期越小(采样频率越高),混叠越小
除非原来的模拟滤波器带限的,通带截止频率小于 Ωs / 2
如果连续时间滤波器在高频部分趋于零,则混叠就很小,可以忽略。
高通 和带阻 滤波器不满足以上要求,会产生混叠,∴ 该方法不适用
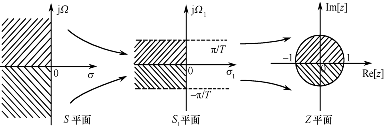
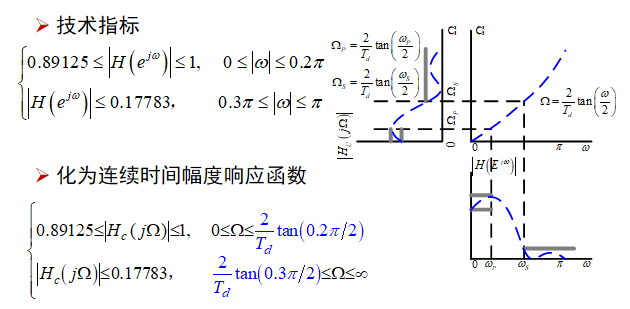
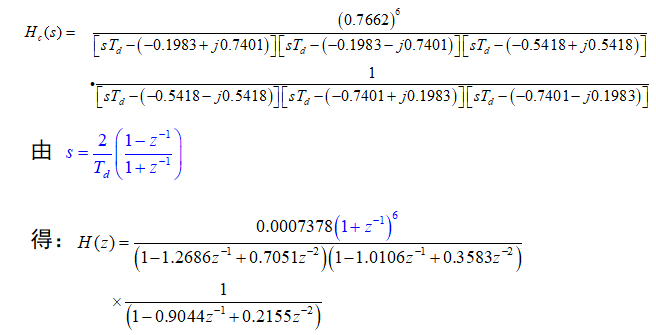
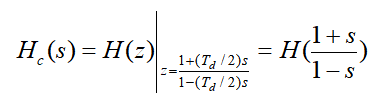
双线性变换法:
重点是找到单点映射
变换公式:
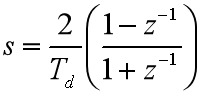
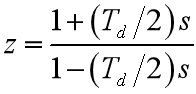
注意收敛域,即s的左半平面和z平面单位圆之间的映射关系
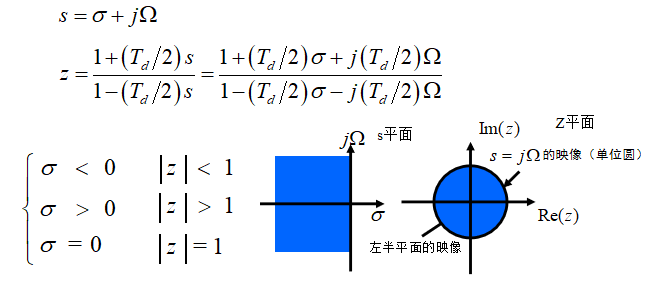
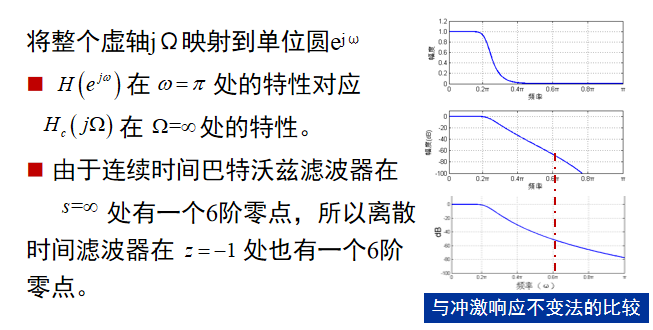
ω 和 Ω 的映射关系:
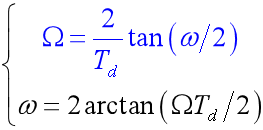
• 避免了混叠
• Ω与ω的非线性关系
• 适于分段常数型的滤波器设计
• 在双线性变换后各个分段边缘的临界频率点将会产生畸变
• 频率预畸变
例题:
总结:
s域 与 z域 变换关系:
冲激响应不变法:
双线性变化法:
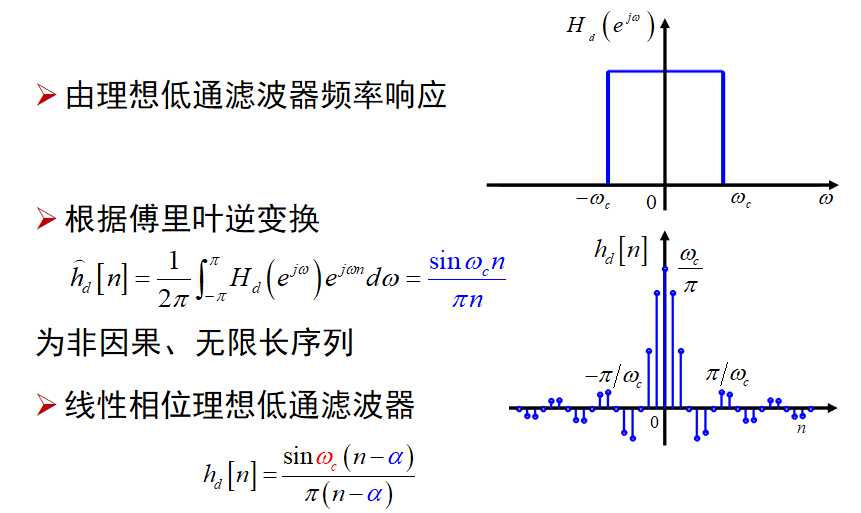
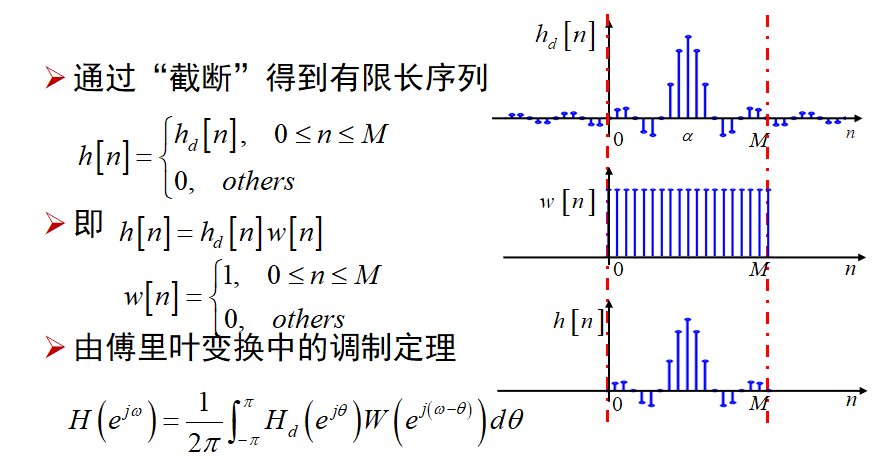
窗函数法设计FIR滤波器
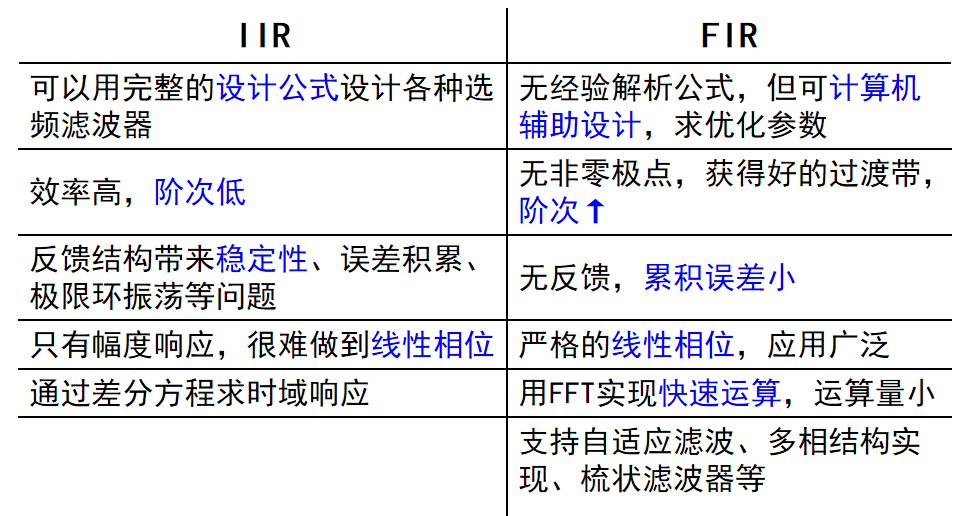
IIR滤波器中有反馈回路,因此量化误差、运算误差迭代累积,增加了不确定因素,如稳定性问题;
FIR滤波器不考虑极点,避免了设计中的频谱因式分解问题,可以设计出严格线性相位;
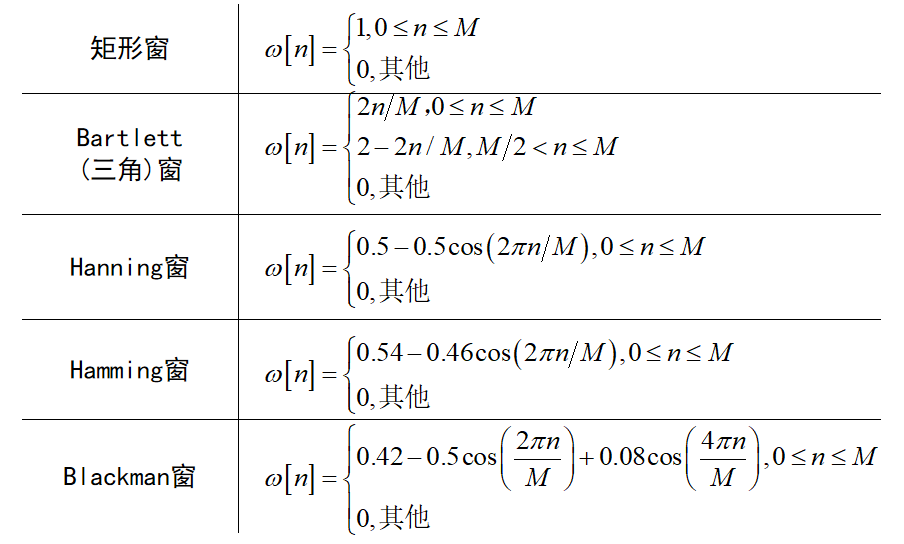
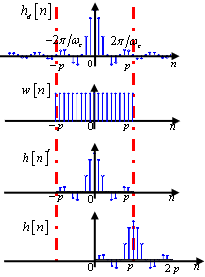
窗函数法:
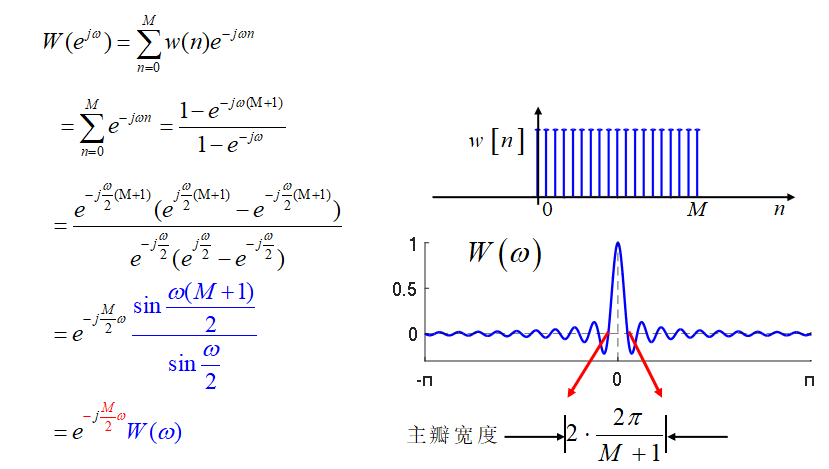
矩形窗的频谱
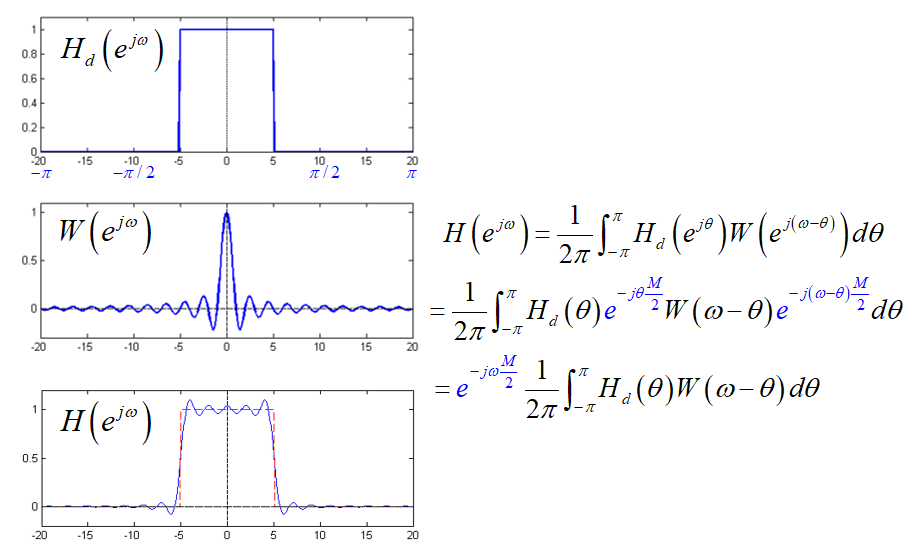
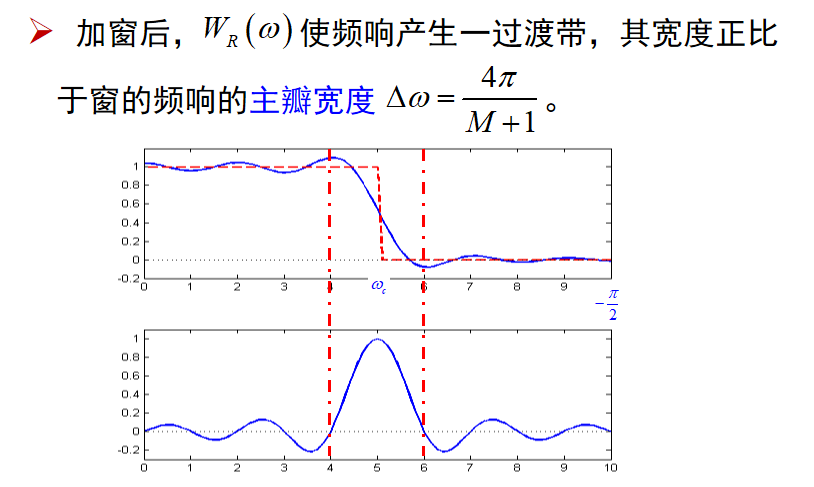
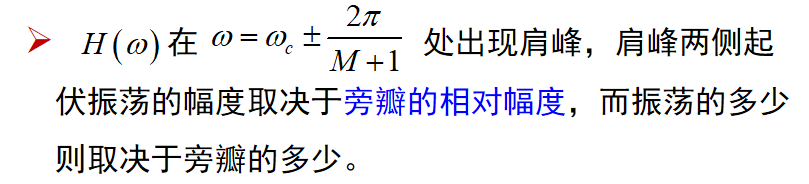
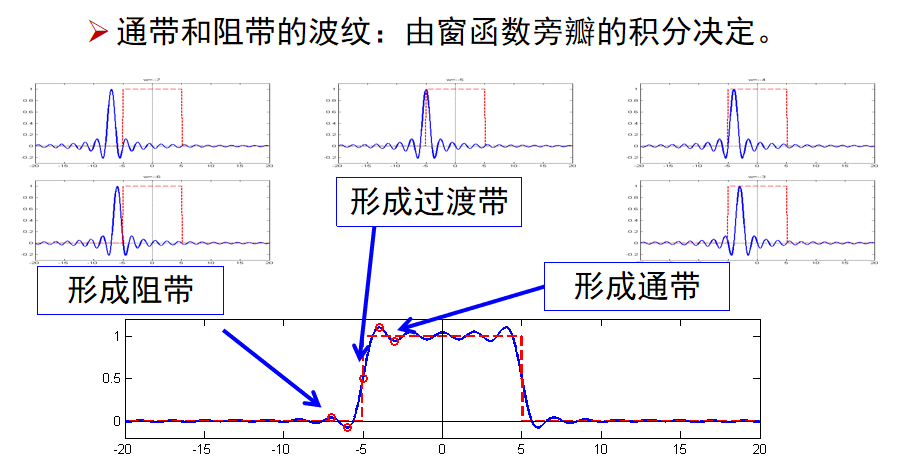
吉布斯(Gibbs)效应

对于矩形窗最大相对肩峰8.95%,不管N怎样改变,最大肩峰总是8.95%,或阻带衰减21dB
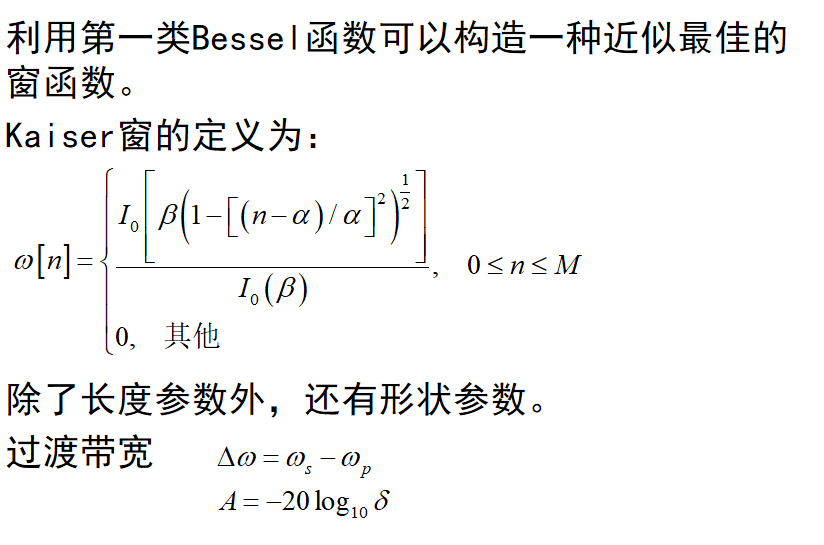
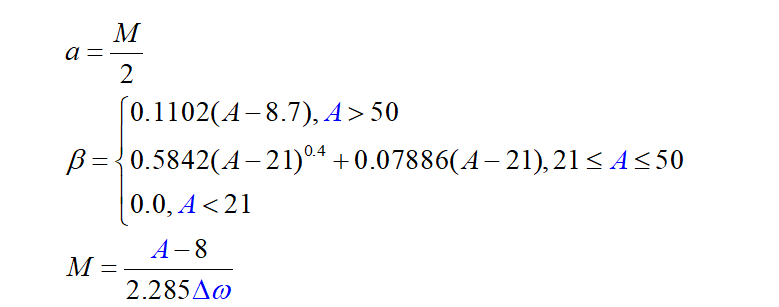
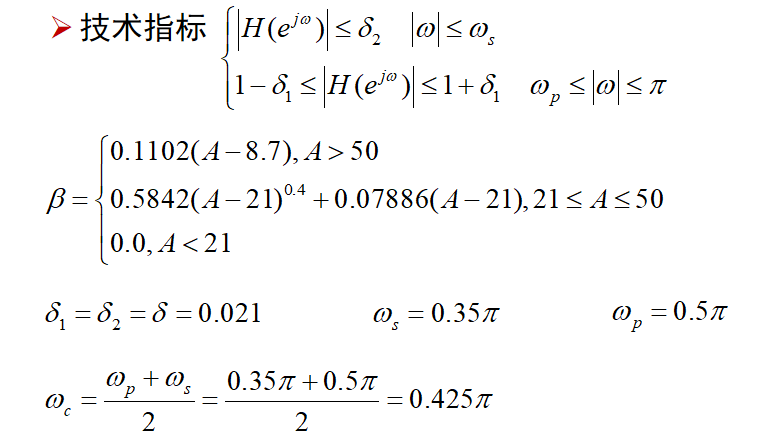
FIR滤波器的Kaiser窗设计法
窗谱:窗函数的频响的幅度函数亦称作窗谱。
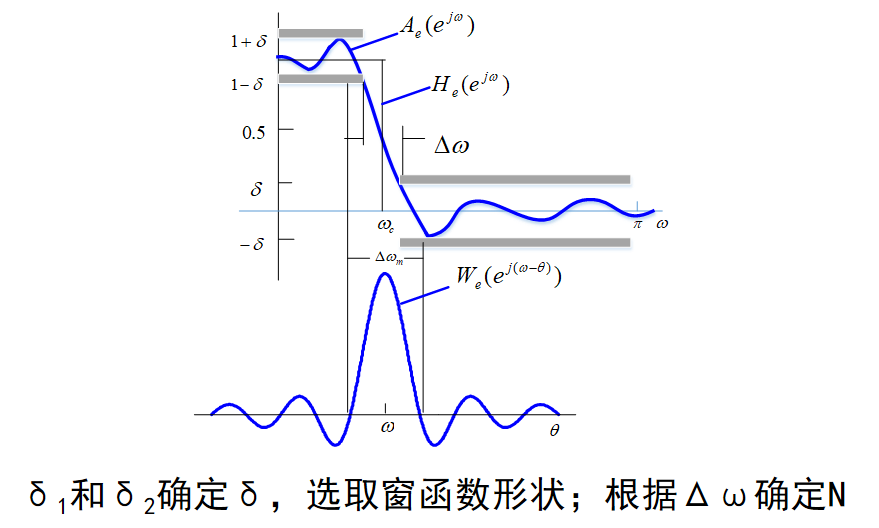
对窗函数要求:
希望窗谱主瓣尽量窄,以获得较陡的过渡带,这是因为过渡带正比于主瓣宽度。
尽量减少窗谱最大旁瓣的相对幅度,这样可使肩峰和波纹减小。
常用窗函数的性质

广义线性相位的合并
系统为广义线性相位
幅度响应部分就是两个实函数的卷积
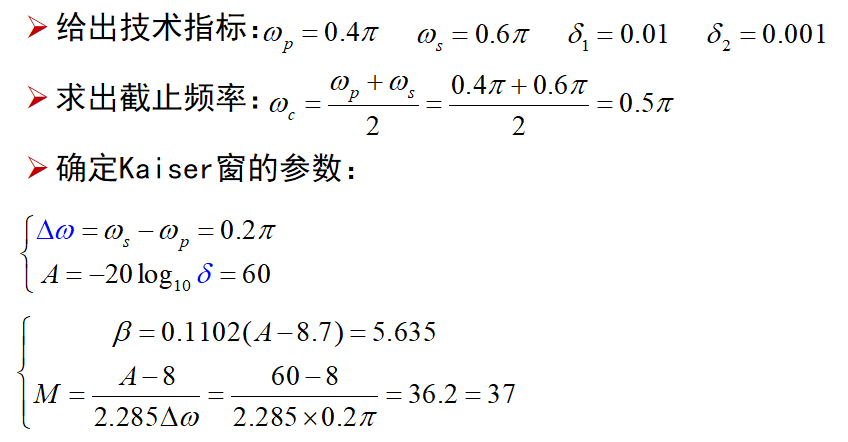
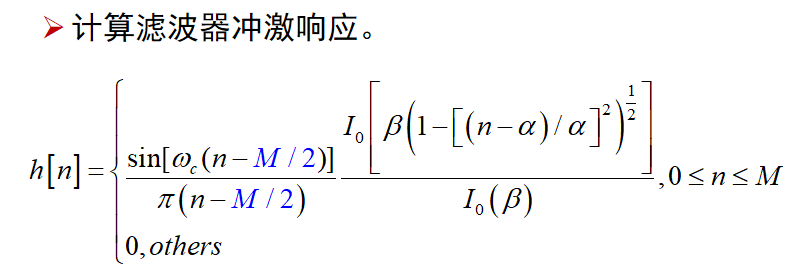
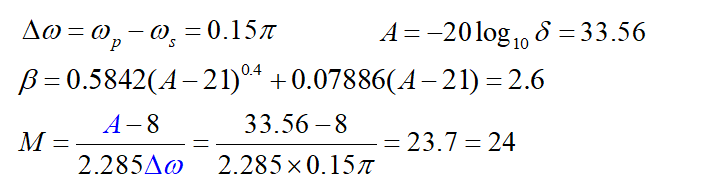
Kaiser窗滤波器设计法
例题:
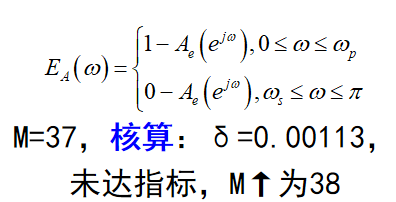
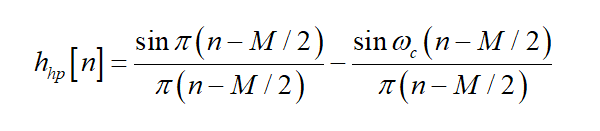
用Kaiser窗设计高通滤波器
IIR和 FIR滤波器的评价
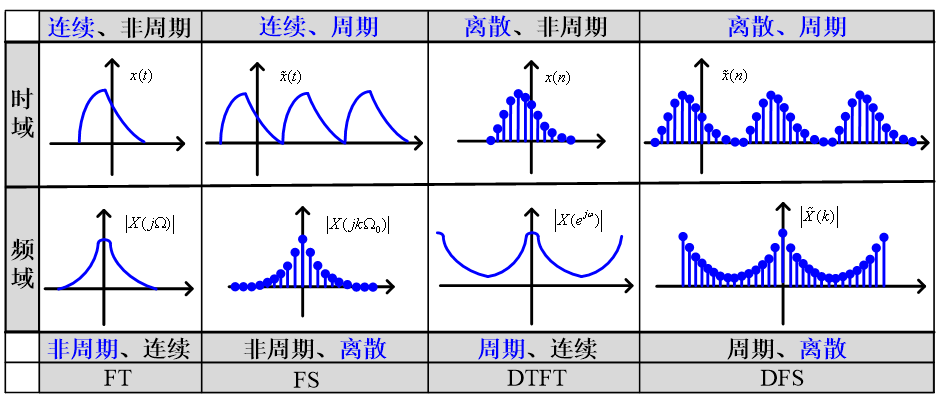
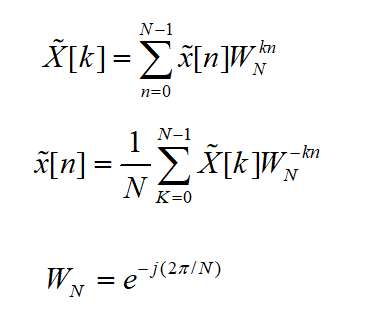
周期序列的离散傅里叶级数DFS
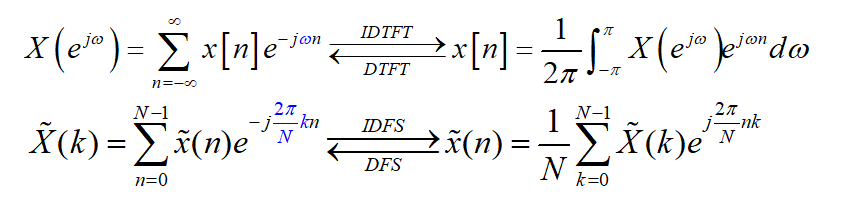
连续时间、连续频率 —傅里叶变换FT
连续时间、离散频率 —傅里叶级数FS
离散时间、连续频率 —序列傅里叶变换DTFT
离散时间、离散频率 —离散傅里叶级数DFS
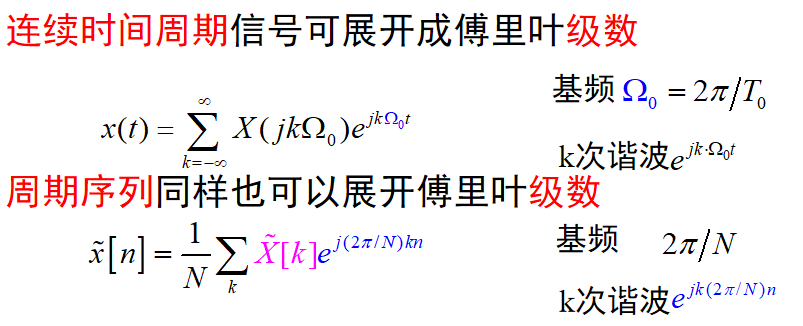
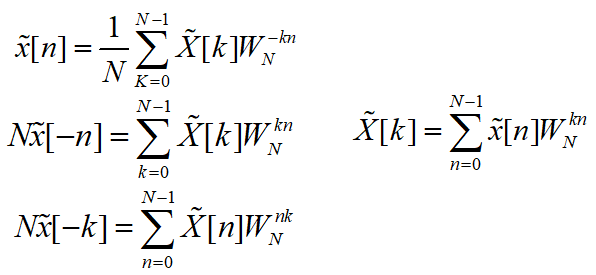
复指数正交性:

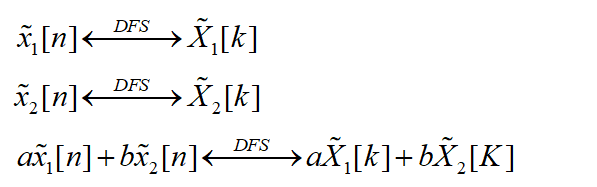
定义及性质:
线性:
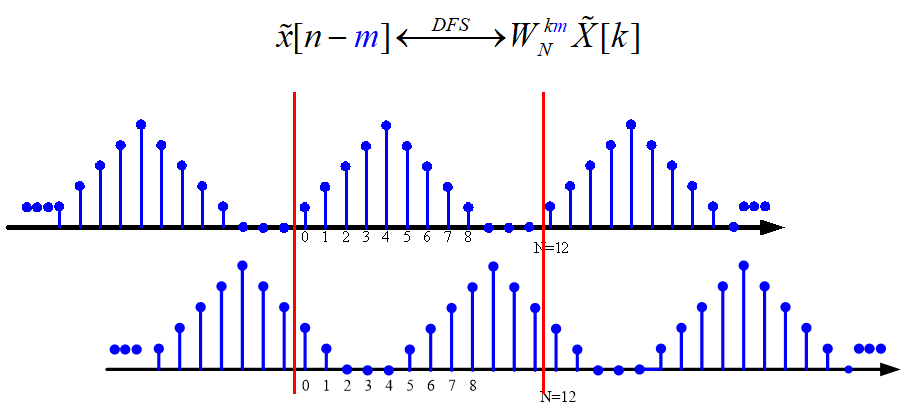
时移:
频移:
对偶性:

周期卷积:
注意:周期卷积与线性卷积的区别

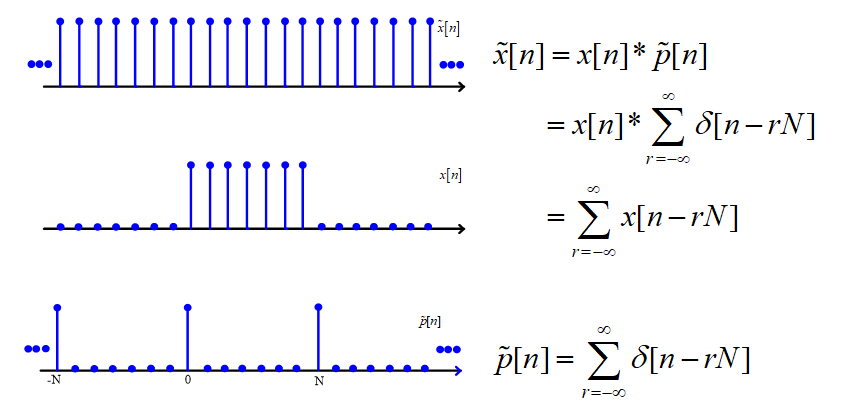
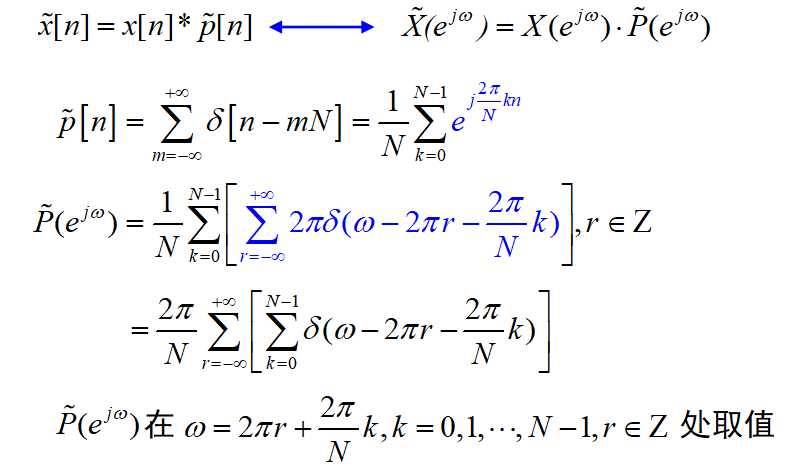
周期信号的傅里叶变换
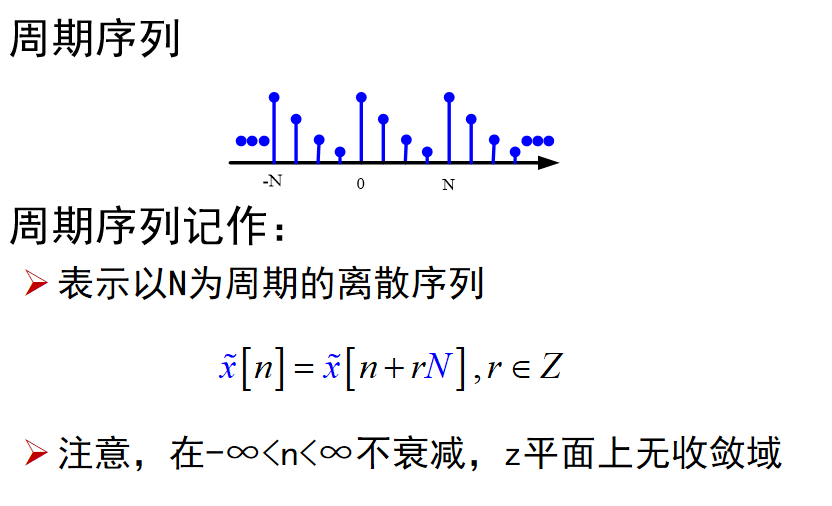
离散信号的周期化:
频域的冲激函数:
 wechat
wechat alipay
alipay